在矿场顶部设置一个 GCP
在矿场底部设置一个 GCP


飞行效率(省电)
矿场每层最大的旁向重叠


规划了 4 次飞行
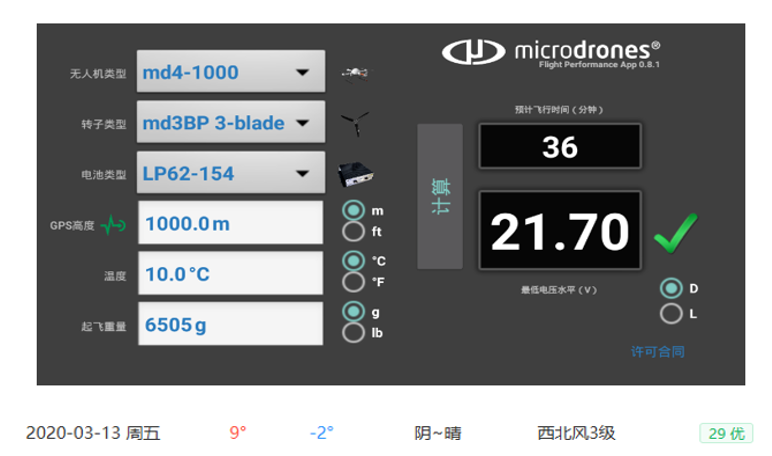
通过 mdFlight Performance App (mdFPA) 可大致了解在测区当前海拔和温度条件下,单块电池可支持的最长飞行时间;
我们规划的每次飞行时间都在预估飞行时间以内(36 分钟);
请记住,此应用程序给出的是包括无人机设备展开的整个飞行时间,无人机需要时间进行校准以及前往/返回任务的起飞地点;
飞行员需要备用电池,以防出现意外情况。
恢复航点
可一次完成整个任务规划。
一个架次结束更换电池后,可以通过“恢复航点”功能继续飞行。
这种方法的优点是系统将从上次的最后一个航点继续执行任务,确保数据是连续的。











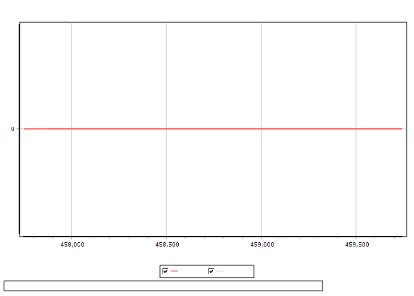
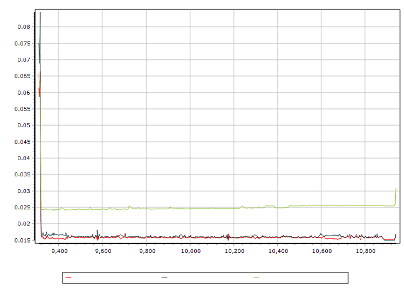
数值为零,意味着数据质量非常好
XYZ三个方向的轨迹精度都非常好
每个架次都不存在 IMU 差距
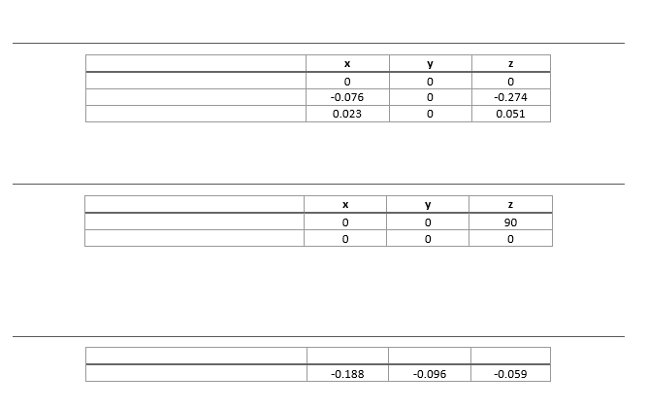
载荷校准报告:

精度增强
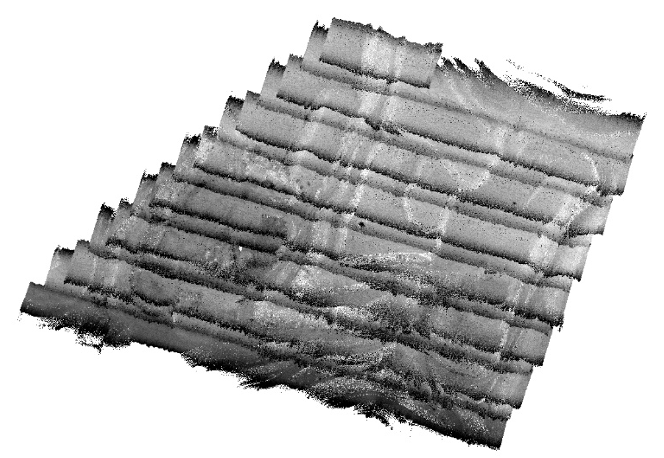
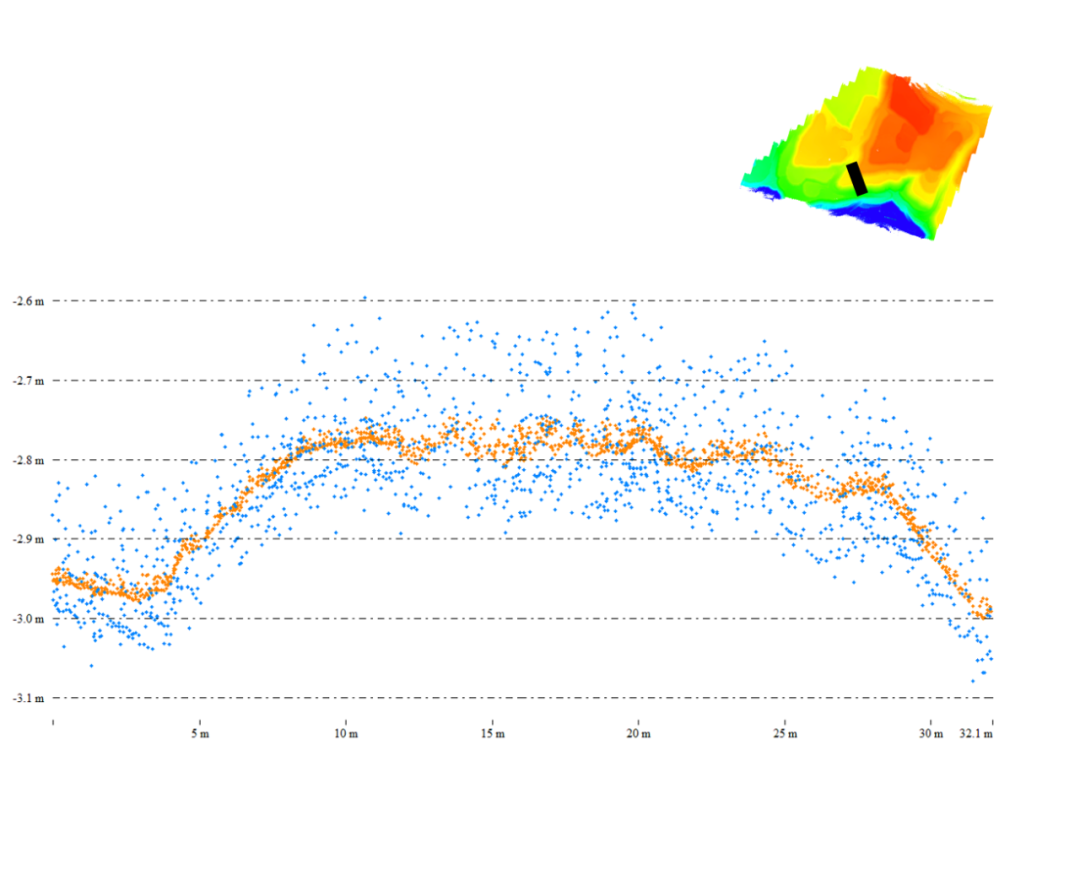
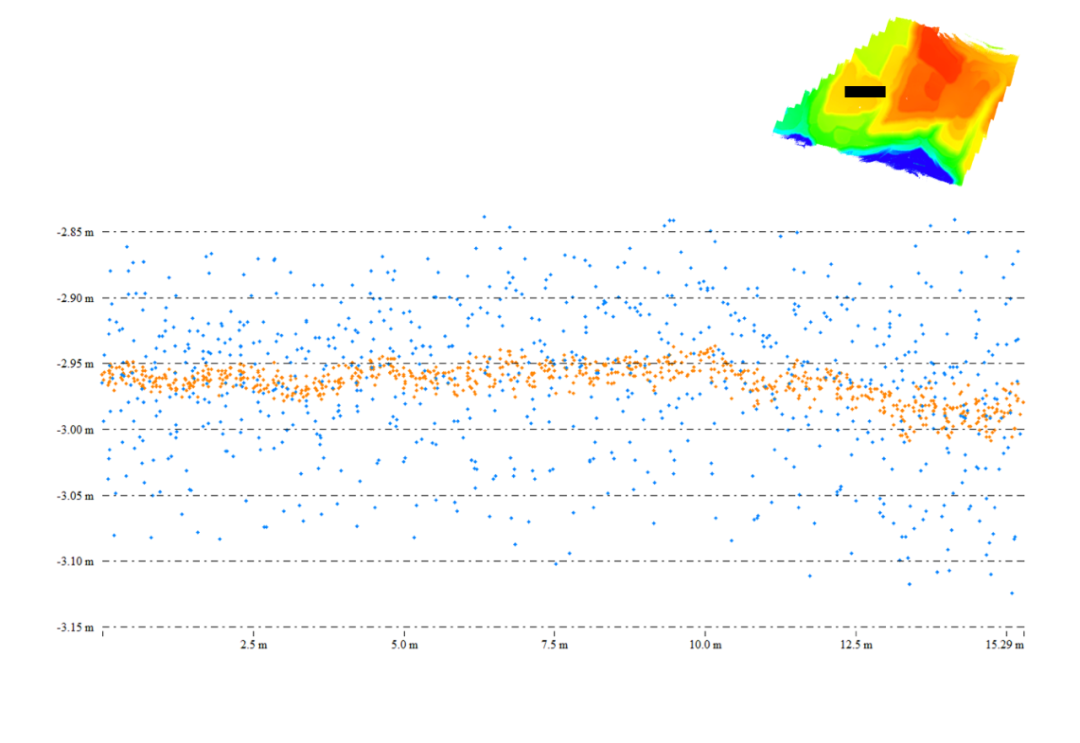
横截面
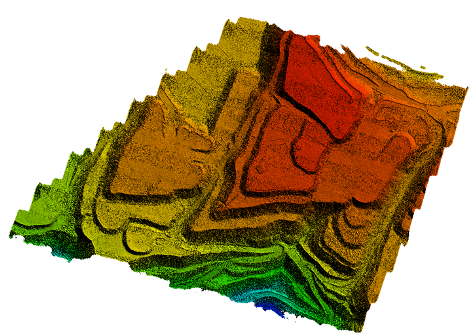
蓝色:原始点云
橙色:精度增强
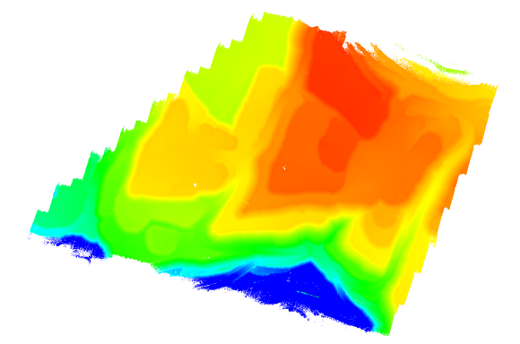
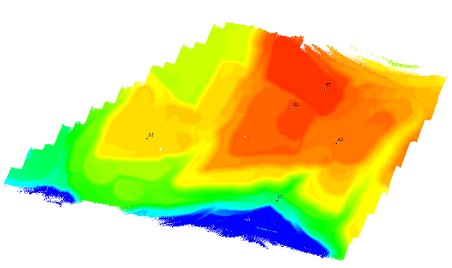
DSM















