案例 | mdLiDAR3000LR 方案应用于贵州省某河道测量项目
2020-10-13 13:20 性质:转载 作者: 镁科众思市场部 来源: Microdrones
免责声明:无人机网(www.youuav.com)尊重合法版权,反对侵权盗版。(凡是我网所转载之文章,文中所有文字内容和图片视频之知识产权均系原作者和机构所有。文章内容观点,与本网无关。如有需要删除,敬请来电商榷!)
2020年年初,贵州省某设计院客户需要使用无人机搭载激光雷达扫描一段河道,河道全长1.3千米,相关区域面积253,350平方米。另外,客户希望进行带状测绘以提高效率...
![镁科众思科技(佛山)有限公司]()
![]()
![]()
2020年年初,贵州省某设计院客户需要使用无人机搭载激光雷达扫描一段河道,河道全长1.3千米,相关区域面积253,350平方米。- 现场风沙很大,特别起风之后,对飞机的防护等级要求较高;
![]()
![]()
![]()
![]()
![]()
![]()
mdSolution: mdLiDAR3000LR 集成方案
![]()
高度设置:300 米
![]()
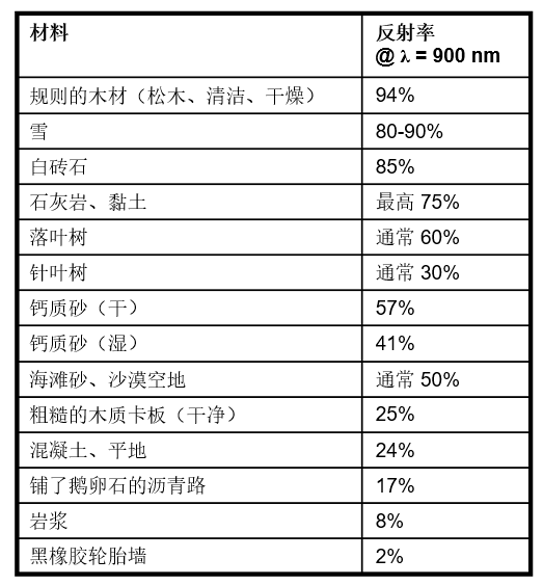
各种材料反射率参照表
目标 — GCP/检查点:6个
![]()
飞行方向:跟随河道带状飞行
带状飞行可以显著提高飞行效率(省电)
跟随河道有助于更好的采集河道信息
![]()
![]()
![]()
![]()
![]()
![]()
![]()
在平板电脑上规划、监控、调整、分析和控制任务。功能性、灵活性和飞行:一切尽在掌握之中。
![]()
![]()
![]()
![]()
![]()
mdInfinity:轨迹处理和轨迹文件 Sbet 生成
![]()
![]()
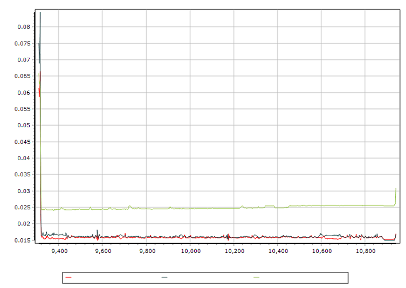
mdInfinity — 轨迹 RMS(X 轴、Y 轴和 Z 轴)数值为零,意味着数据质量非常好
XYZ三个方向的轨迹精度都非常好
mdInfinity数据处理平台:LiDAR 地理定位和定向
![]()
![]()
![]()
mdInfinity数据处理软件和第三方软件:可交付测绘成果的生成
![]()
![]()
![]()
![]()
![]()
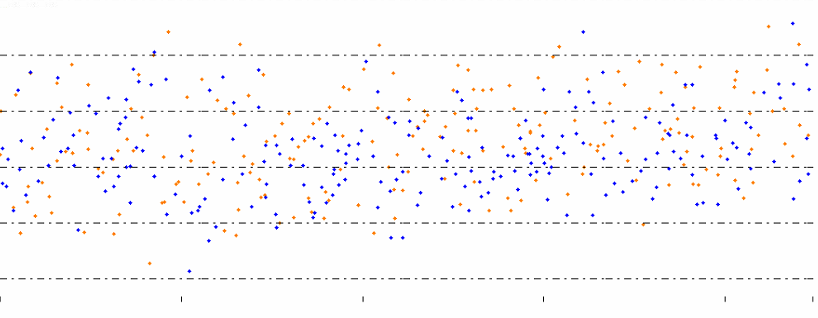
两条航带的噪声包络线必须保持一致,必须混合两条航带,不得使一条航带高于另一条航带。在该实测项目中,Microdrones 使用了 mdLIDAR3000LR 无人机集成系统,在演示区域飞行1个架次,共扫描0.772平方公里,飞行高度300米,采集了GNSS数据,机载激光雷达原始数据,惯导数据。经过处理得到了该区域的数字三维点云,点云密度为每平方米58个点。为了正确评估测绘成果的准确度,Microdrones 采用了以下方法:- 使用Global Mapper 软件,导入Las 格式的数字三维点云。
- 使用Global Mapper 软件,在点云上采集所有坐标已知的地面检查点。
- 将点云上测量得到的检查点坐标与用户提供的已知点坐标进行比较。
![]()
![]()
![]()
项目成功!
![]()
![]()
![]()
测区河道
![]()
![]()
![]()
![]()
成果精度高(Z中误差,点云1mm以下);
生产效率远超传统测绘方式,一个架次即可完成,地面站式扫描仪在河道存在架站困难的问题;
mdLIDAR3000LR 方案低重叠度的特点大大提升了带状测绘的内外业效率;
单次飞行时间30分钟以上,1个架次即可完成此次项目;
对于植被茂密的中国西南地区非常适合;
mdLiDAR3000LR 方案无数据分层现象,利于带状测绘。