3.2.3 影像获取
影像获取主要包括起飞前检查、无人机航飞、现场数据整理、检查等。
( 1) 起飞前检查
为确保无人机航摄安全,飞机通电后需要进行自检及严格的安全检查,具体如下:
①gBox 状态检查,线缆连接检查、GNSS 天线视野开阔、gBox 正常启动、锁定卫星检查。
②相机检查,SD 检查、相机设置检查、设置快门速度、清洁相机镜头和滤镜、相机热插拔线路连接、尼龙扣带固定、相机触发器检查、快门反馈检查。
③跟踪器检查,确保跟踪器打开、接收器接收信号检查。
④升降翼检查,外弦升降翼与内弦升降翼水平检查、升降翼反应检查。
⑤发射架检查,发射架装配、安全插销插入发射架、弹力绳力度检查。
⑥空速反应检查,确保空速反应正常。
⑦飞机定位检查,飞机装配到发射架上,定位螺旋桨位置、飞机位置正确。完成起飞前检查后,拆除安全插销,启用无人机系统,等待系统正常启动后,即可发射无人机。
( 2) 无人机航飞
无人机起飞后,按照规划路线升空进行影像数据采集,地面站开始对飞机工作状态进行实时监控,技术员应时刻关注无人机的状态、风速、飞机的高度及速度等指标,如发现异常应立刻做出判断和处理,如正常即按预定线路采集完成后返航降落。项目共航飞9 架次,采集影像数据2 600张。
( 3) 数据整理及检查
现场对航飞数据进行整理,核查拍摄照片数量与飞行轨迹参数是否一致,是否出现漏拍现象; 检查照片质量,是否有模糊不清等情况; 现场对航飞成果质量的进行全面、快速检查、计算航向重叠度、旁向重叠度、生成检查结果报表等。检查完成后如存在质量问题则需重新补摄飞行,若无质量问题,则本次航摄完成,如图6 所示。
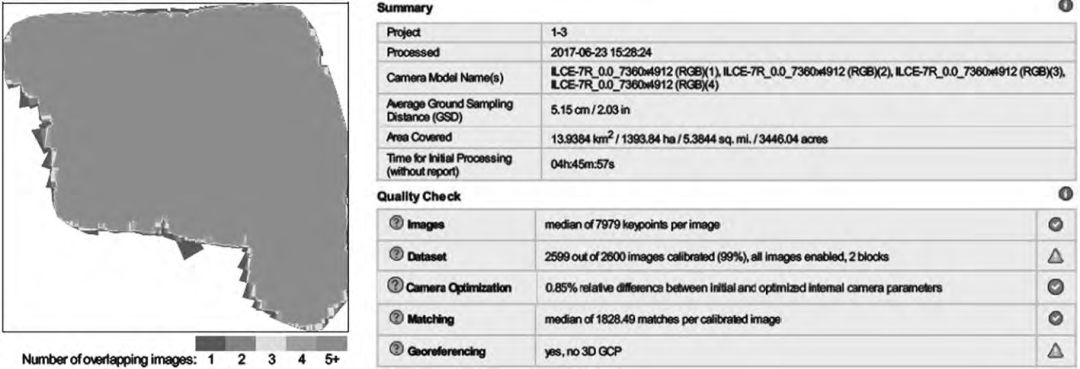
图6 外业航飞质量检查
3. 3 数据处理与DOM 制作
3.3.1 空三加密
数据预处理主要包括原片检查、POS 数据整理、控制点数据整理等。预处理完成后利用INPHO 软件进行空三加密处理。空三加密过程中,在立体像对的点位上选刺控制点,通过控制点点位调整及平差优化,最终从40 个控制点位中选择了28 个点作为控制点,其余点位作为检查点,同时为了增加模型连接的强度,避免由于某一个控制点的误差过大引发全局性的负面影像,在立体像片上增加一些模型连接点tie point 参与空三平差。经过反复的点位调整、优化,最终达到平面0.07 m,高程0.06 m的绝对定向精度,如图7 所示。
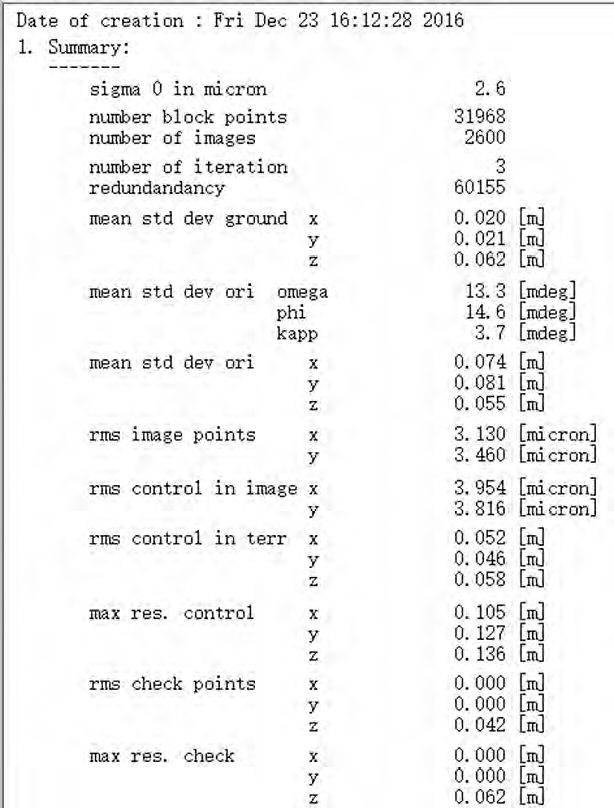
图7 空三加密精度报告
3.3.2 DOM 制作
根据上述空三加密的成果,利用DEM 数据对影像进行数字微分纠正和影像重采样,生成单片的数字正射影像DOM,由于无人机飞行高度较低,高层地物同名点视差较大,按照相机中心投影的成像原理,影像边缘投影误差较大,往往会出现接缝和建筑物边缘扭曲的现象,所以,需要对正射影像的镶嵌线进行人工编辑,镶嵌线的选取等。
修改尽可能避免穿过大型建筑物,选择纹理不丰富的位置,远离影像的边缘,尽量沿道路及地面实体的边缘等。同时,对于不同拍摄角度、位置的照片存在的色差、亮度差进行匀光匀色处理,镶嵌线周边羽化处理,保证照片镶嵌自然,整体影像亮度、色差一致,如图8 所示。

图8 0.05 m 分辨率DOM 成果
3.3.3 DLG 立体采编
本项目1 ∶ 500DLG 制作通过航天远景Map Matrix平台与清华山维EPS 平台的定制与对接,利用EPS 平台进行二次开发,使立体测图与得到“图属合一”的GIS 数据的工作目的同时达成,相比国内目前绝大多数的DLG 生产流程更为高效、先进。
( 1) 数据准备,准备INPHO 空三平差工程文件及无人机原始影像数据,将必要的文件放到同一的文件夹的同级目录下,如影像ID、外方位元素文件,加密点文件,像点文件等,保持文件前缀名称一致。
( 2) 新建工程,打开EPS 基础测绘平台,选择航测采编模块,建立广州市基础地理模板-500 工程文件。
( 3) 模型恢复,选择立体测图菜单,加载立体像对,恢复立体模型。
( 4) 立体采编,挂接外接输入设备,设置工作区,开始进行数据采集工作。
按照立体模型实际能观测到的原则进行全要素采集,尽可能对可观测到的地物按照“内业定位、外业定性”的原则进行数字化跟踪,外业调绘修编等工作,共编制1 ∶ 500DLG 成果216 幅,如图9 所示。
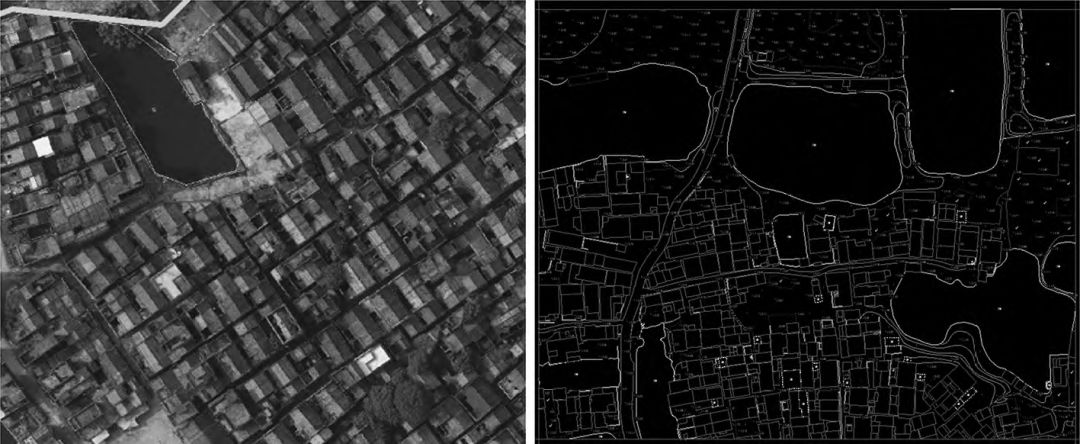
图9 编绘的DLG
4 数据处理关键技术研究
4. 1 建筑物投影差改正[12]
本项目通过前期的研究成果,采用一种联合影像方位元素和物方三维点云数据的方法,利用投影中心、DSM、DEM 上形成的同名点共线关系,由DSM 物方点利用外方位元素计算出的DEM 像方点之间的高差所构造出的数字高程模型,形成跟随影像点位同步变化的投影高差模型,此处称它为影像同步变化的投影数字差模型( image elevation synchronous model, IESM) ,通过该模型采用共线方程解算房屋屋角的三维坐标,从而实现了建筑物的半自动投影差改正。由于测区建筑主要以低层居民房为主,利用投影差改正模型取得良好效果,如图10 所示。
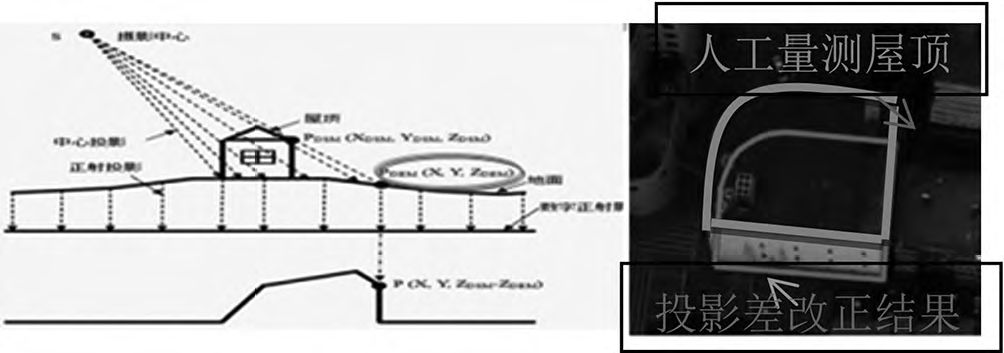
图10 投影差改正原理及效果图
4. 2 EPS2012 集成二次开发
本项目以广州市规划基础信息化测绘平台EPS2012 为基础,采用VC++6. 0 开发平台及VBScript 脚本语言进行功能专业二次开发,实现了应用程序层以及全局数学函数库与控件库的动态链接SDL( Sunway dynamic linked library) ,快速搭建了基于EPS2012 航测采编平台,实现运行时动态加载或输入命令加载,如图11 所示。新开发的EPS 测图功能集成模块化管理,通过菜单工具条加载功能,延续了EPS 原有功能界面与操作习惯。同时对数据模板进行标准化封装,实现1 ∶ 500~1 ∶ 2000数据标准在制图显示过程中强制标准化,实现数据生产、制图输出、数据建库、数据应用四者一致性,有效保证数据无异化。
图11 基于EPS2012 平台开发的测图系统
5 项目成果与精度分析
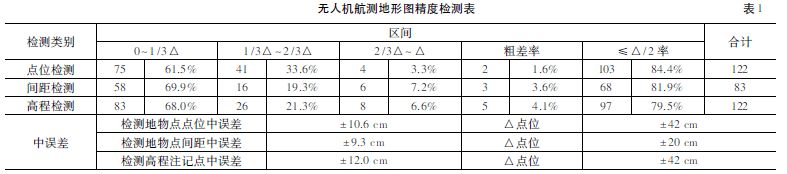
基于无人机航摄数据,经上述流程化的处理,得到测区DOM、DEM、DLG 等,为了保证成果精度,对本次航摄测绘的地形图成果精度进行外业检测,采用GZCORS_RTK 快速获取外业检查点的三维坐标数据,整个测区内施测平面坐标及高程检测点122 个、距离检测点83个,利用中误差计算公式计算出各个检查点的中误差,依据计算结果可得( 如表1 所示) ,本次航摄绘制的1 ∶ 500地形图精度满足《低空数字航空摄影测量内业规范》的精度要求。可作为基础测绘成果提供使用。
6 结语
本文无人机航摄测绘大比例尺地形图生产应用,基于地形结构较简单、地势比较平坦地区,经实地检测,成果满足大比例尺地形图精度要求,作业效率也较传统测量模式有大幅提高,有效提高生产效率,缩短生产周期,加快了内、外业数据成产的一体化作业流程。满足了项目建设快速完成测绘任务的要求,为大比例尺地形图快速测绘提供了新的技术手段。
随着数字城市、智慧城市建设的全面发展,城市规划及建设对地形图的需求与日俱增,且更新周期越来越短。低空无人机航摄系统,凭借低空作业、机动灵活、高分辨率、高精度、高效率、低成本等特点,已广泛应用于城市规划、低空航空摄影、应急测绘、环保监测、工程勘察等领域。随着无人机航摄技术的不断成熟,续航能力、飞行稳定性、小像幅等缺点也将逐步得到改善,使其有更广阔的应用前景和优势。















