据外媒New Atlas报道,四轴飞行器通常能通过固有结构保持稳定的飞行。然而,这样的设置确实使无人机难以穿过狭小的空间。不过由法国Étienne Jules Marey运动科学研究所(隶属于法国国家科学研究中心)创建出的Quad-Morphing无人机将能解决这个问题。
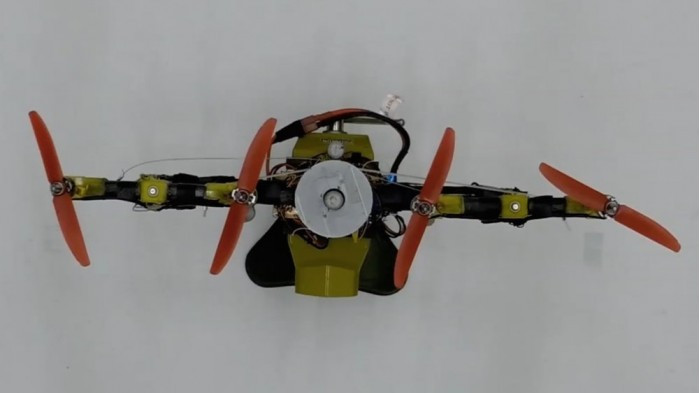
Quad-Morphing无人机配备两根水平臂,每根臂上都有一个朝上的螺旋桨。在正常飞行中,这些臂垂直于无人机的中心轴线,将四个支柱放置在传统的方形中。然而,当飞机需要通过缝隙时,一系列柔韧而坚硬的导线会旋转臂,使它们平行于无人机的中轴线。这将四个螺旋桨连成一排,将翼展减半。

虽然这种配置提供的稳定性和控制能力较差,但它所需要做的就是让四轴飞行器以9公里/小时的速度穿过缝隙。一旦通过,臂就会再次旋转。
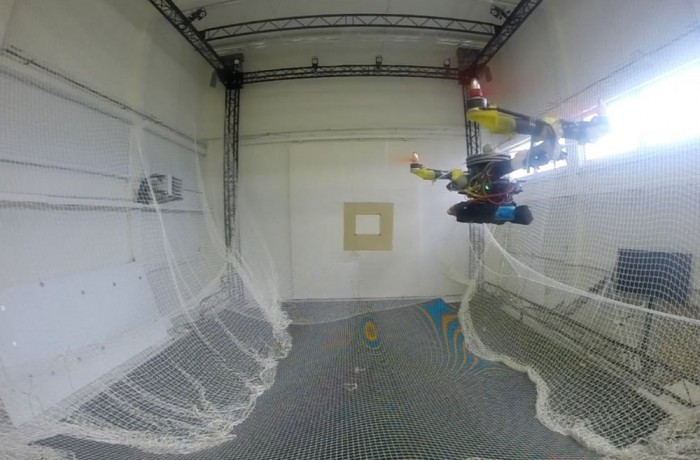
在目前的室内测试设置中,机臂旋转由3D定位系统触发,该系统包含17个固定摄像头阵列,可在飞行器飞行时跟踪无人机。另外其还配备了一个机载微型高速摄像头,允许它独立评估间隙尺寸并根据需要旋转机臂。
关于这项研究的论文最近发表在《 Soft Robotics》杂志上。















