
飞马F200是飞马机器人自F1000后,自主研发的一款全自动任务模式的工业级高精度无人机系统;系统依托F200高精度无人机平台,为用户提供多源数据获取手段,任务载荷采用模块化设计,具备可见光、近红外、热红外和视频数据获取能力,以及大比例尺稀少控制点成图、三维建模等数据处理能力;搭配的无人机管家专业版软件,为用户提供以GPS解算、控制点量测、空三解算、海量影像高精度快速拼接等为功能链路的大比例尺航测解决方案;F200整机系统延续了飞马机器人高度工业化、高可靠性、全自动化的设计理念,主打高可靠性、单人作业、可重复高精度作业。
系统参数
材质:EPO+碳纤复合材料
翼展:1.9m
机长:1.07m
标准起飞重量:3.7kg(航测系统)
最大起飞重量:3.8kg(倾斜系统)
巡航速度:60km/h
最大续航时间:1.5h
最大可手抛起飞海拔高度:4500m
升限:6000m(海拔高度)
飞行真高:150—1500m
测控半径:10km
起降方式:手抛起飞/自动滑降、伞降
载荷:多模块可互换(航测模块/倾斜模块/视频模块/近红外模块/热红外模块)
信号跟踪:GPS:L1/L2;BD:B1、B2;GLONASS:L1,L2
采样频率:20Hz
定位精度:5cm
解算模式:PPK
系统特点
1、双频差分GPS定位系统
提供厘米级POS数据,实现无控制点或稀少控制点成图。
2、多源数据获取能力
支持全画幅相机/倾斜相机/近红外/热红外/视频模块。
3、一站式大比例尺成图解决方案
支持从航线设计、控制点量测、空三解算到高精度快速拼接的处理流程。
4、基于飞马云的主动式服务
支持重要信息及时推送、实时同步、多终端共享。
5、快速任务响应、无操控手无遥控器
模块化设计、免工具拆装、全自动起降的任务模式、支持单人作业。
关键部件
1、无人机专用频段数传电台
飞马机器人自主研发、无线电核准委员会认证产品,840.5MHZ-845MHZ专用频段、跳频设计、抗干扰能力强。
2、智能电池模块
飞马专用智能电池模块,单手即可完成电池的安装和更换,支持电池使用状况监控、一键查看电量,有利于保护电池,避免过充、过放风险。

3、一次性降落伞
飞马专利一次性降落伞,免叠伞、免维护、低成本,能适应各种恶劣地形,可应对各种突发情况,保证伞降安全。

4、自动驾驶仪
►先进的总能量算法
►全自动的任务方式
►基于实时操作系统的高可靠性任务调度和进程通信
►支持全系统(GPS、北斗、GLONASS)双频GPS信号接收,GPS+INS组合导航算法
► PPK解算、提供厘米级POS数据

倾斜模块
F200倾斜模块采用独特的双相机设计方案,结合无人机管家智能航线设计,具备高质量的侧面纹理采集及高效率的作业能力;F200倾斜系统是传统多旋翼倾斜无人机作业效率的10倍,主要定位面向大范围工程项目。

1、模块参数
相机型号:SONY QX1*2
传感器尺寸:23.2*15.4
有效像素:2010万(5456*3632)*2
镜头参数:20mm定焦(定制镜头)
镜头角度:左38°左倾;右25°后倾
采集分辨率:优于3.5cm
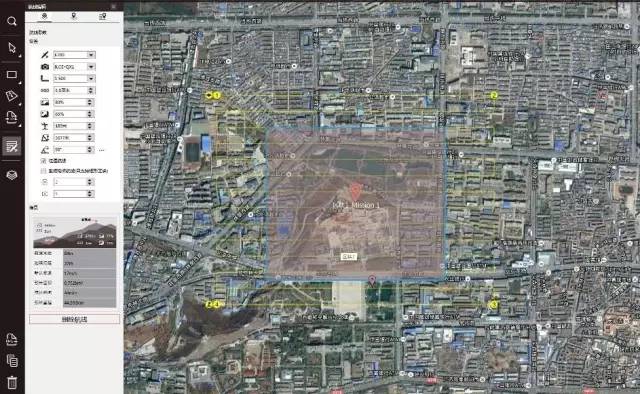
2、航线设计
无人机管家“智航线”支持全自动倾斜航线生成:规划或导入区块只需填写目标分辨率及重叠度要求,即可自动生成航线,具备自动划分架次等功能。

航线设计图
F200倾斜航线默认为往返航线设计,搭配独特的双相机角度设计,单架次航线即可获取覆盖区域4方向的侧面纹理。同时,针对纹理要求不高的任务,选择非往返设计亦可建模,数据获取能力提高一倍。
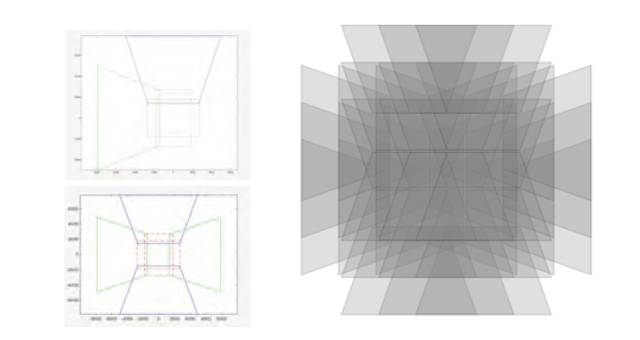
相机脚印示意图
3、定制镜头
F200倾斜模块的相机镜头采用索尼定制20mm定焦镜头,镜头为缺省无穷远对焦模式,减少相机设置难度,有效提高对焦稳定性及影像采集质量。
4、数据预处理
无人机管家“智理图”具备EXIF写入功能,可以将F200的高精度POS数据直接写入照片EXIF,写入后可直接导入Context Capture等软件进行数据处理,有效减少数据整理及预处理的工作内容。
5、作业效率
采集分辨率 航向重叠度 旁向重叠度 往返设计/架次 非往返设计/架次 架次/天 3.5cm 80% 65% 1km² 2km²
≥4
5cm 80% 65% 1.5km² 3km² 10cm 80% 65% 3km² 6km²
应用案例
1、布达拉宫三维建模案例
2016年11月2日,飞马智能航测系统F200完成布达拉宫倾斜数据获取。此次飞行系国内首次对布达拉宫开展无人机航拍作业,所获数据用于布达拉宫三维重建工作。
布达拉宫目标区域0.75km²,区域高差50m,在“智航线”中按照地面分辨率4cm、航线重叠度80%、旁向重叠度65%做往返设计,共计生成航线45km,作业时间45min。
布达拉宫航线设计图
飞行当日,F200原定在布达拉宫广场起飞,起飞海拔近3500m;经过现场踏勘,发现布达拉宫场环境复杂且游人较多,为确保飞行安全,最终采用异地起降方案,即在布达拉宫城楼楼顶起飞,于布达拉宫广场降落。

布达拉宫城墙起飞

布达拉宫广场降落
航拍作业约45min后,F200安全降落。此次飞行共获取原始影像1904张,采用建模软件Context Capture获取如下建模成果:

原始影像

三维建模成果

三维建模成果

三维建模成果
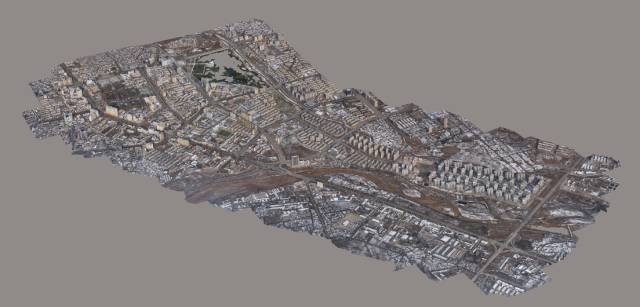
2、沧州城区三维建模案例
2016年10月20日,F200搭载倾斜模块完成沧州市政服务中心1平方公里倾斜数据获取。F200飞行30分钟,获取有效原始照片2000余张,数据成果图如下:

整体三维建模成果

局部三维建模成果

局部三维建模成果

局部三维建模成果
3、喀什城区三维建模案例
2016年11月27日,F200搭载倾斜模块完成喀什城区6平方公里倾斜数据获取。此次项目面向快速建模需求,航线设计采用非往返设计,设计分辨率7cm,共计飞行2架次,数据成果如下:
三维建模成果

三维建模成果

三维建模成果

三维建模成果

三维建模成果
4、官厅水库三维建模案例
2016年12月1日,F200搭载倾斜模块完成官厅水库坝区三维数据获取,飞行一架次,覆盖面积1km²,飞行时间50min,获取原始影像2076张,建模成果如下:
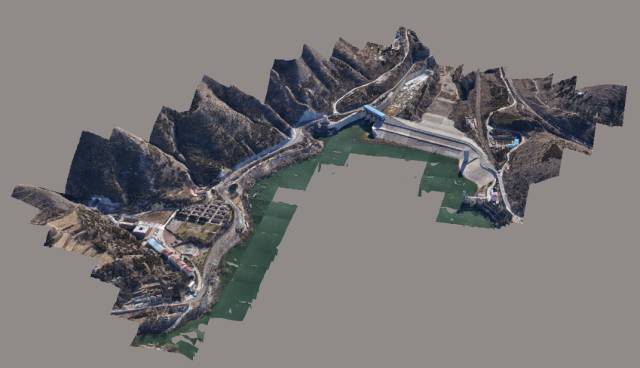
三维建模成果

三维建模成果
5、宁波东钱湖三维建模案例
2016年11月,F200搭载倾斜模块完成宁波东钱湖10平方公里倾斜数据获取,设计分辨率5cm,航线采用往返航线设计,共计飞行7架次。航线设计及建模成果如下:
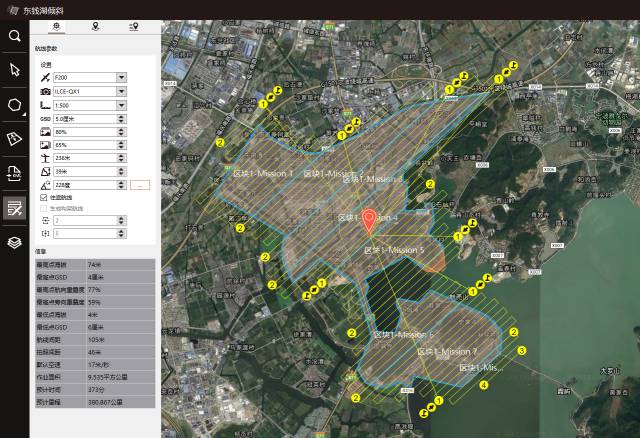
航线规划图
测区成果总览

局部成果

细节成果

细节成果
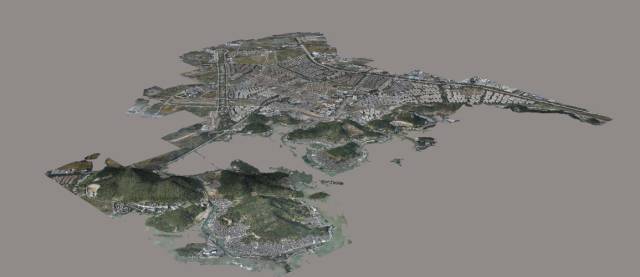
6、宁波市轨道交通实景三维项目
2017年4月,F200完成宁波市轨道交通实景三维项目,总面积约90平方公里。

测区航线规划图
目标测区为带状分布,预设航高200-230米,地面分辨率≮5cm;针对高层建筑密集区,航高为300-400米,地面分辨率≮8cm。该项目采用双机协同作业,有效工期为15天。

带状三维成果

局部成果

局部成果
深圳飞马机器人科技有限公司,由IT、无人机领域高管及资深专家联合创办,致力于民用超小型无人机系统的研发、生产及销售。
公司成立于2015年2月,注册资金6300万。
北京、深圳均设研发中心,近10年的无人机行业、技术积累,结合IT领域产品设计、工业化制造经验,飞马机器人致力于为客户提供便捷易用的工业级无人机及创新的消费类无人机产品。
飞马秉承创新、价值、诚信的核心价值观,为客户提供极佳使用体验、安全、技术领先的无人机产品,志在成为全球无人机行业的领导者。
















