
4月13日,拓攻微课堂有幸邀请到上海拓攻机器人有限公司的产品经理王飞,为大家分享有关植保飞控T1-A的基本常识以及针对不同类型的植保无人机,如何正确的安装与调试等问题。关于当天的分享内容,拓攻农业小编已经帮大家整理成课堂笔记,方便后期大家对相关知识的复习和查阅。学员们不要忘记点击右上角收藏文章哦~
Part1: 关于植保飞控 T1-A的基本常识
如何定义植保飞控呢?
飞控,众所周知,是指能够稳定无人机的飞行姿态,并控制无人机自主或半自主飞行的控制系统,是多旋翼飞行器的大脑。而植保飞控则是针对植保的作业环境,在稳定性、可靠性和多功能性方面做了更多改善以适应田间作业的飞控系统。
植保飞控T1-A各个模块的功能与属性
主控FCU,集成了陀螺仪、加速度计、气压计等传感器,采用了内减震的方式。同时,气压计独特的导流静压舱设计,在提高稳定性的同时,一定程度上缩小了主控的体积。除此之外,主控FCU分别提供8路输入和输出口以及两路CAN插口和一路串口。
电源模块PMU,最大可支持12S电源,负责给整套飞控系统供电,包括外接的接收机,最大可持续3A电流输出。PMU提供3路CAN总线接口,充当CANhub的同时,还可以保存10组黑匣子数据,
指示灯LIU模块,通过LED灯的闪烁方式来输出信号,比如绿紫代表GPS模式,黄灯持续单闪代表一级低电压报警。除此之外,LIU还提供一个micUSB接口,主要是用于连接电脑进行参数调节。
外部设备扩展模块DCU,此设备提供六个接口,分别为X1~X6接口,X1接口为输入接口,用于检测药量水位。X2-X6为信号输出接口,用于连接水泵,配合智能喷洒的实现。很快还将支持前后喷头独立控制以及离心雾化盘的定速设置。
GPS模块,除了包含卫星信号的接收模块以外,还内置一颗磁罗盘,用于感知当前飞行器的飞行方向。(由于此模块容易被干扰,所以在装机时,大家需要特别留意)

T1-A是根据实际的植保作业需求所研发的一套飞控系统,它具有一系列和植保作业相关的功能,例如:

药量监测功能
可实时检测药量,当药量过低时,飞控系统会自动的关闭水泵,同时会记录一个断药点。
智能喷洒功能
飞控系统可控制流量与飞机的飞行速度相关联,即植保无人机飞行的速度越大,其流量则越大。
断药续喷功能
当飞控系统检测到低压警报、药量低警报、或者一键返航的信号后,T1-A将自动关闭水泵,并记下当前坐标点为续喷点。
半自主作业模式
当切换到半自主作业模式以后,可以通过横滚杆进行一键换垄的操作,主要用于不规则的区域作业。
AB点功能模式
进入AB点模式后,飞行器将自动沿A点与B点之间往返,每到A点或者B点后,将自动换行,机头方向是始终由A指向B。
除此之外,植保飞控T1-A还支持拓攻农业--植保作业的辅助工具与管理平台,可方便飞防人员实时监控作业情况。再加上高精度RTK,就可以实现厘米级定位,为精准农业保驾护航。

Part2:如何正确的安装调试?
1、植保飞控的安装
安装时,电调电源线布线时,尽量不要采取环形布线方式。
FCU方向要求和GPS模块保持一致,尽量安装在机身稳固的地方,比如螺丝、螺柱、加强筋或者环氧树脂较多的地方,以大拇指按按压不变形为准。
PMU在安装时候,要注意通风,同时由于PMU设计电流有限,不可以从PMU取电,供舵机等额外设备。
DCU的X2-X6接口是无需供电的,为了保证DCU的稳定工作,如果您的电调中间带有BEC输出接口,则需要将5V BEC断开。
GPS模块则要尽可能的裸露在外面并要尽量架高,同时保证GPS支架要安装牢固。
2、植保飞控的调试
在各个部件安装到位以后,开始将您的飞控系统连接电脑进行调参的工作,首先保证调参过程中,没有接通动力电,然后选择您所需要的机型,并且根据飞机的轴距选择最接近轴距的参数,默认感度为100不变。
接下来就是必不可少的五大校准了,分别是遥控器校准、电调校准、水平校准、磁罗盘校准和电压校准。其中,电调校准和电压校准虽然比较简单,但是需要通动力电的,在这里强调一下,在校准过程中,请务必保证不要安装螺旋桨。
接下来的遥控器校准,重点提一下要对PWM、PPM类型的接收机进行失控保护设置,油门、俯仰、横滚、偏航都要处于居中位置,然后第五通道设置在失控的位置,如下图所示:

水平校准就比较简单了,将飞机放置在相对水平的位置,把遥控器做一个外八动作坚持10秒后,将自动进入水平校准程序,磁罗盘校准则是经常会做的一个校准,校准时要注意旋转方向和旋转速度,同时,仔细观察LED的变化。
植保设置栏相对来说是比较容易被理解的部分,根据作业状况来设置飞行速度以及喷幅。
3、植保无人机的试飞环节
在正式试飞之前,我们还需要进行一次飞前检查。如各部位螺丝松紧状态,折叠件部分是否存在较大虚位,然后观察LED灯闪情况是否存在异常,比如黄蓝就是代表遥控器失控。然后解锁检查电机启动顺序以及转向是否正常,以上检查无误再进行安装螺旋桨的工作。
接下来就是到了试飞的环节,首先还是要检查一下刚才安装的螺旋桨的正反转是否正确,然后观察LED灯闪烁情况,进入GPS模式以后,也就是LED灯在闪绿紫的时候,再进行低空试飞。
此时,如果飞机出现异常,请立即降落,排查原因。如果飞机出现高频抖动同时飞机修正比较僵硬,则要将稳定感度和姿态感度降低,建议每次降低10点,然后再起飞测试。
如果飞机起飞后出现摇晃,不容易稳定的情况,则需要将稳定感度和姿态感度再往上调节一点,同样建议每次增加10点,然后再起飞测试。直到选择较为满意的手感与飞行状态为止。
4、植保功能测试
如AB飞行、自动断药、作业模式、调节水泵喷洒量等,每一项测试都需要仔细阅读说明书部分,如AB点需要在距离飞手较近的地方打A点,距离飞手较远的地方打B点,否则飞机则会对头飞行,慌张的情况下有可能造成炸鸡等严重后果。
另外,在使用断药功能时,也要注意飞机在返回断药点的时候是处于自驾模式,此时除油门杆量以外,其他均不受控制,但是可以通过切换至姿态模式加以控制。

Part3:植保飞控常用配件的安装调试
液位传感器
官方配备的液位传感器采用机械式液位开关,内置干簧管,浮球随着液体上升或者下降,利用球内靠近磁簧开关的节点,产生开与关的动作,从而进行液位的测量。
但是,大家需要注意的是,出厂时液位传感器为常闭型,也就是说浮球落下的时候为闭合状态,如果将浮球反过来安装,则变成常开型。有部分用户呢,因为好奇将其打开,再次安装的时候,由于浮球反装继而造成了在水箱满水状态下,飞控会发出液位报警的提示。
另外,在安装液位传感器时,尽量的选择安装在水桶中间部位,同时将浮球装在水桶最低位置。
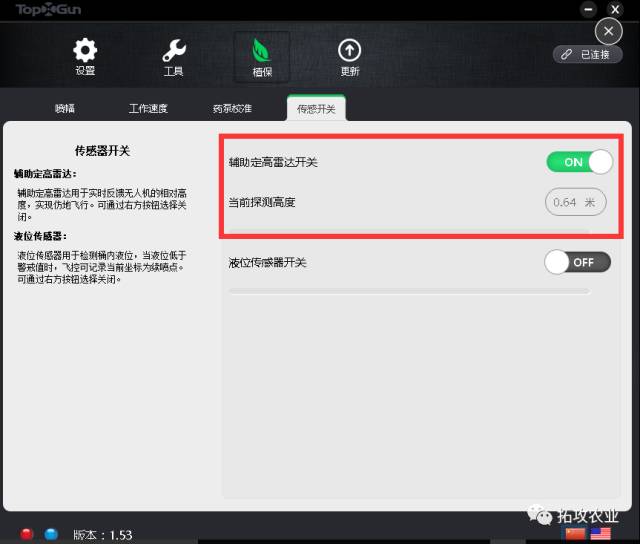
地形跟随雷达模块
这款雷达模块为红外激光雷达, T1-A 能够根据雷达模块反馈的数据,实时调整植保无人机的飞行高度,保证无人机与农作物之间的相对高度基本保持不变。有效定高范围为0.3~6 米。
在安装时候呢,应尽量保证雷达模块垂直向下,并且正下方无遮挡。同时,严禁安装在雾化喷嘴周围,以防水雾影响雷达定高效果。另外呢,在安装完成以后,不要忘记在调参软件中把定高模块打开。如下图所示:
此外,还有一点需要大家注意的是,雷达模块暂时不支持玉米、高粱、荷花塘等高杆稀疏作物。主要是因为雷达模块在检测此类高杆稀疏的农作物的时候,检测到的数据容易在作物表面和地面之间不定时的来回切换,从而造成飞机高度不稳定的情况。
上海拓攻机器人有限公司(TopXGun Robotics)是全球专业的无人机飞行控制系统及行业应用解决方案提供商。公司目前150多人,其中研发人员70多人,技术核心团队均来自南航、北航等航空专业院校及无人机研究所,拥有丰富的无人机行业经验和产品研发能力。
我们围绕客户需求持续创新,秉承“让天下没有难用的无人机”理念,打造智能飞控和行业解决方案,为更多领域提供专业服务。
拓攻产品线覆盖飞控产品、飞控相关配件和行业定制方案。飞控产品包括:农业植保专用飞控Ti-A,行业专用双备份M2飞控,Apollo机载计算机等行业级飞控产品;6公斤、10公斤、16公斤、20公斤植保无人机;垂直起降固定翼无人机,大型固定翼无人机等。拓攻提供行业无人机飞控系统定制服务及解决方案,目前已涵盖航拍、农业、安防、巡线、测绘、物流、救援、环保等领域,致力于打造精准智控。
拓攻秉承“开放、合作、共赢”的理念,积极寻求合作伙伴共同创新,形成健康良性的无人机产业生态系统,推动无人机行业持续发展。
专为行业应用设计
了解详情
X30 系列吊舱稳定画面 远距传输
了解详情
















