北京时间5月5日消息,要想检验你的理论,和无人机打一架或许是一种很奇怪的方式,但斯坦福的一名研究人员恰恰就这样做了。
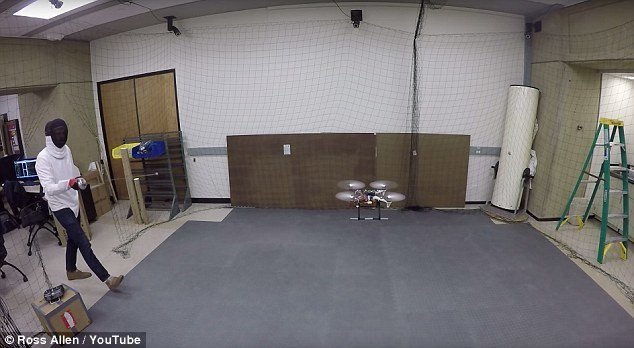
斯坦福的罗斯·艾伦(Ross Allen)认为,为了测试他研发的无人机躲避系统,最好的方法就是用剑去攻击无人机。于是他穿上全套击剑装备,拍摄了这则视频,记录了他的无人机在躲避碰撞时的表现。

而最终的测试结果令人印象颇深。在这段长约两分半钟的视频中,只见研究人员穿着全套传统击剑服装,不断用剑去戳无人机,但无人机就像能“看见”剑戳过来一样,总能灵活地避开。
斯坦福大学航空与航天系的研究人员提出了一种设想,利用“从线下到线上的计算范例,通过机器学习实现的邻域分类,采用最优控制距离度量的、基于样本的路径规划,以及通过轨迹平滑实现飞行器的实时路径规划”。
为了让飞行器知道自己的位置,罗斯·艾伦和马可·帕沃恩(Marco Pavone)使用了碰撞检测模块和一个用来输入障碍躲避算法的输入源。
他们在实验室中设置了一个传感器,用来起到摄像头的作用,它会向计算机和无人机发送周边区域的实时数据——这就构成了所谓“从线下到线上”的部分。
研究人员称,这一系统框架的原理可以被概括为几句话:通过机器学习展开探索,通过视觉控制做出决策,以及在可能的情况下进行预先计算。
该团队还计划在未来加入“一系列视觉、激光和超声波传感器”。
斯坦福智能系统实验室的另一支研究团队正在与NASA Ames研究中心合作,共同研发一款无人机交通管理系统(unmanned aerial system traffic management system,简称UTM),用来帮助管理数量不断增加的无人机。
“UTM将执行空中交通控制的许多功能,但它将被放置在云层中,主要靠自动控制。”斯坦福智能系统实验室主管、航空与航天学助理教授麦可·科钦德尔弗(Mykel Kochenderfer)说道。
NASA认为这一技术将能够帮助我们管理大量的无人机,而且不需要在它们飞行时派空中交通控制员进行监管。

该系统的主要部分将由自动碰撞躲避功能构成,如果无人机可能撞上其它物体,配置的软件将会同时通知多架无人机,并为它们提供躲避方案。
“随着飞行器的数量不断增多,怎样躲避的问题也变得越来越复杂,数学家把这个挑战称作‘维度灾难问题’”。机械工程研究生Hao Yi Ong说道,“因此我们必须找出比蛮力搜索法更好的方法。”
美国空间局认为这一理念可以通过两种途径来实现。
一种是便携式UTM系统,能够移动到不同地区,为精细农业和灾难疏导等活动提供支持。
另一种则是固定式UTM系统,可以为低纬度地区的相关活动提供支持,并持续覆盖一整片地理区域。
但NASA表示,无论选择哪种方案,都需要持续不断的通讯、定位和监视(CNS),才能为系统的一致性提供追踪、保证和监管。
















