最近,美国斯坦福大学仿生与灵巧操作实验室(实验室网站)公布了他们正在开发的一种新机器人:既能在空中飞,又能在竖直墙壁上降落,然后还能顺着墙向上爬。
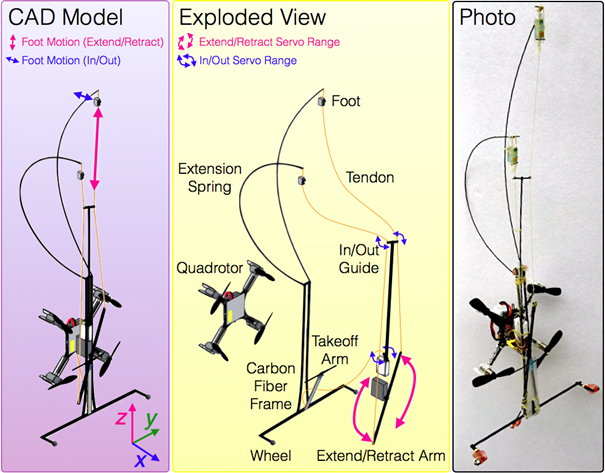
SCAMP的CAD模型以及照片/图 来源网络
实验室网站发布的视频介绍了这位仿生机器人家庭新成员“SCAMP”,即“斯坦福攀爬与飞行操纵平台”的缩写。“SCAMP”有两条长长的前腿和两只带刺前脚,还有条像啄木鸟一样的尾巴,背负四翼螺旋桨。两条长腿由碳纤维和另一种高强轻质Spectra纤维制造,通过两脚轮换承载力来爬行,其效率可媲美真的昆虫。据实验室网站介绍,该机器人能飞行、降落、攀爬,脚下打滑时还能站稳了再爬起来、再起飞,这一切都是通过机载传感器和计算机来实现。如果SCAMP未能抓稳开始下滑,此时无人机将检测到这种突如其来的垂直加速度,并快速开启旋翼,再次恢复攀爬,可避免机器损坏。这种设计灵感源自于自然中的技术发现--即便像不会飞行的动物热带雨林蚂蚁都可以通过使用空气动力恢复攀爬。
“阿特拉斯”大型机器人能越过崎岖的地形把装备补给送到人类无法到达的地方,而“SCAMP”能到达“阿特拉斯”到不了的地方,在战场或救灾中发挥巨大作用。
研究人员认为,机器人更小的话,相对于体积而言黏合度更高,受到碰撞时会更稳定,能更快调整方向,更容易找到落脚点。此外,机器人越小,与空气的相互作用越大。但它也有缺点:大部分这样的四旋翼飞行器,其电池只够它们飞几分钟。
研究人员在最近的《机器人学报》和《光谱》杂志上介绍了这项成果。论文第一作者摩根·珀博(个人主页)说,“SCAMP”是第一个把飞行、降落和被动附着技术、攀爬相结合的机器人。虽然降落是个难题,因为无人机要找到一个合适的落脚点概率很小,不过加上攀爬能力,它就能更准确地到达目的地。此外,就算风太大不适合飞行时,它也能爬过去。















