2023年马上悄然进入年中,转眼即将步入2023下半年,感谢这么多年来对傲睿尔的关注。
不积跬步、无以至千里。不积小流、无以成江海,两年来,对AoriFlightSim自研飞行仿真引擎的持续打磨,使我们的飞行仿真产品日渐成熟。
本次公布的内容为无人机传感器相关的仿真内容、让我们一起看看主要有哪些新特性吧~
传感器仿真
AoriFlightSim飞行仿真引擎可通过光学传感器成像仿真(含可见光、红外和激光雷达)实现无人系统对环境感知仿真,提供RGB相机及其视频流输出、激光雷达及其点云数据实时生成,可以广泛应用于无人系统算法验证。
· 可见光仿真
摄像头仿真基于环境物体的几何空间信息构建对象的三维模型,并根据物体的真实材质与纹理,通过计算机图形学对三维模型添加颜色与光学属性等,包括单目、双目和鱼眼摄像头的仿真。

▲多类型摄像头仿真

▲ 摄像头仿真效果--晴天

▲ 摄像头仿真效果--阴天
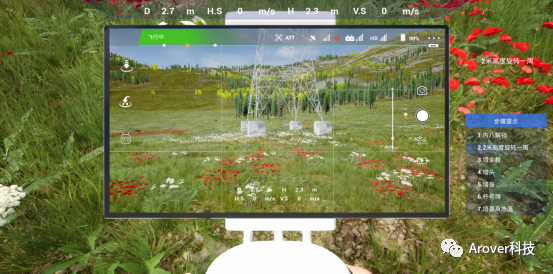
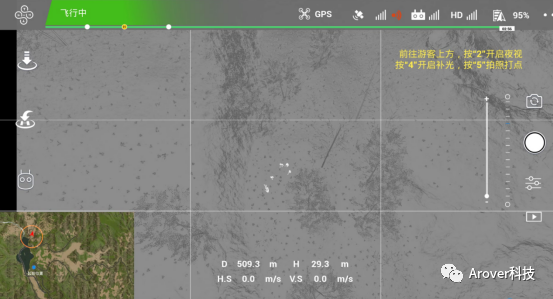
▲摄像头仿真效果---图传视角
红外仿真
AoriFlightSim飞行仿真引擎实时生成高精度的红外成像图及各类红外评估指标。仿真引擎经过了多套试验数据校核和调优,具有了较高精度和实时计算效率。摄像头仿真通过坐标系转换的方法,将三维空间中的点通过透视关系变换为图像上的点。对相机镜头的结构与光学特性,相机传感器数据采集和处理过程,相机图像信号处理过程,以及部分集成AI芯片的相机目标级识别结果进行仿真。具体流程如下:

▲ 摄像头仿真过程
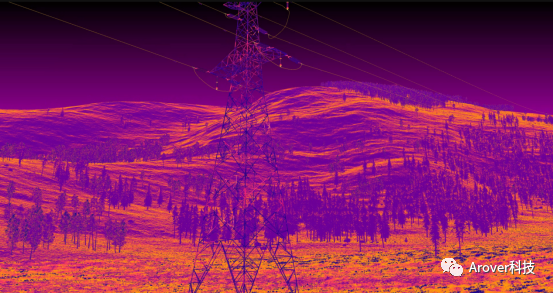
▲ 摄像头仿真-红外(铁红)
▲ 摄像头仿真-红外(白热)
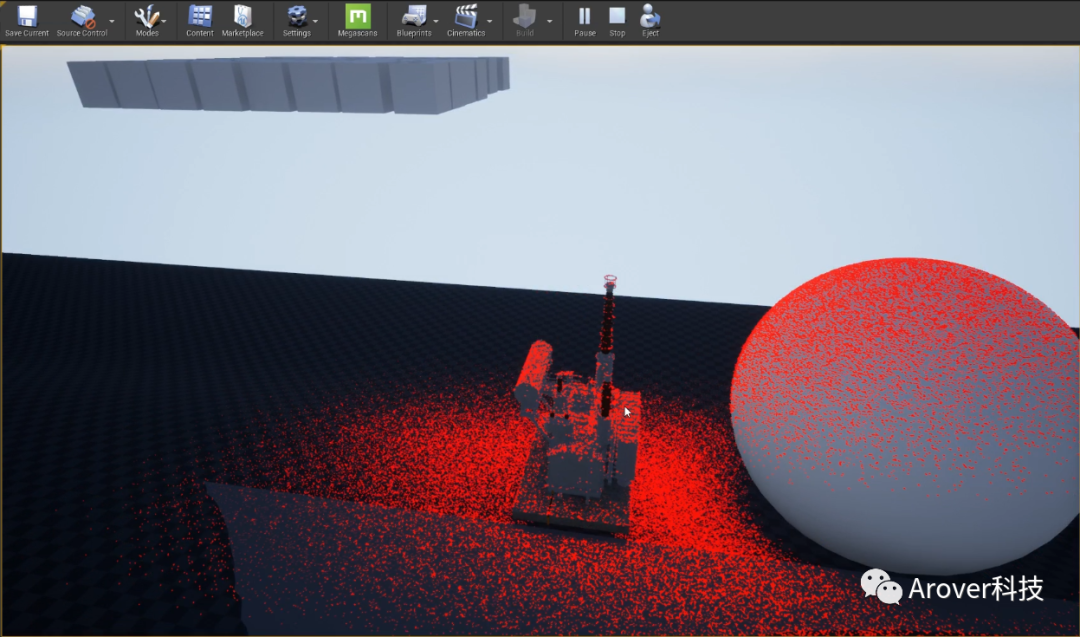
· 激光雷达仿真
激光雷达仿真模拟雷达光电发射和接收的工作过程,激光束与仿真场景中所有物体求交,根据相交点的物理材质类型和属性计算出该点的激光反射强度和噪声。
AoriFlightSim仿真引擎使用基于GPU加速的激光雷达仿真方法和RTX显卡实时光线追踪技术,仿真出无限接近于真实世界的激光雷达点云。
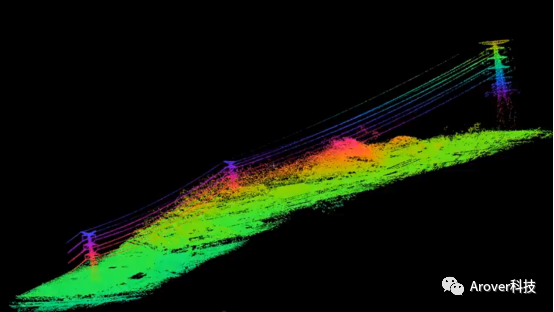
▲ 激光雷达仿真点云--输电线路
激光雷达反射强度受到障碍物距离、激光反射角度以及障碍物本身的物理材质影响,仿真时需要给场景资源设置合适的物理材质,包括各种杆塔、花草树木、地形、水文、障碍物、线路走廊等。AoriFlightSim仿真引擎从真实雷达扫描数据中提取反射强度模型驱动仿真模型,通过实际标定获得物理材质在当前激光雷达下的反射强度和噪声。
▲ 激光雷达仿真点云--自研引擎实验
· 仿真测试
针对电力领域高质量标记数据不足的情况,利用虚拟样本结合少量人工标记样本迭代式増量学习的方法,通过电力场景绝缘子自爆、防震锤缺失等实验表明,对于不同数量的实际训练样本,通过添加虚拟样本扩大训练集后,图像目标识别率均会得到提高,尤其在小样本的情况下,识别率提高非常显著,同时本方法在军工等领域均有较好的应用前景。

▲ 虚拟样本效果图--绝缘子自爆

▲ 虚拟样本效果图--桥洞积水
武汉傲睿尔科技有限公司成立于2016年,位于武汉市武昌区,是一家长期致力于无人机机巡数据采集、数据展示、数据分析的科技型企业,涵盖无人机航测、GIS平台软件开发、VR/AR行业应用等业务,并拓展至水利、军工等多个领域。
公司拥有一支架构合理、创新意识强、文化素养高、互补性强的企业经营、管理、研发团队(硕士及以上学历者占25%),具备较强自主研发能力,完全掌握现有产品核心技术及知识产权。公司通过ISO 9001质量管理体系,公司设有现代化、高科技、多功能的综合电工电气实验室。
公司一直高度重视自有产品的科研开发及自主知识产权的保护,累计申请国家专利11项,软件著作权10项,2018年被武汉市科学技术局评为《武汉市科技“小巨人”企业》,被武汉市软件行业协会 评为“企业信用评价AAA级信用企业”,成为武汉市大数据协会“理事单位”、武汉市软件行业协会“理事单位”,小先后承担包括《基于全景的输电线路多场景AR巡视的研究与应用》、《基于虚拟现实及全景视频的沉浸式飞行避障两栖无人机巡线技术研究及应用》、《基于无人机的劣化绝缘子带电检测技术研究及应用》等各类电力科技(技改)项目近十项,积累了丰富的科技项目运行经验。
公司自创建以来,坚持技术创新、质量可靠、服务优质的原则,倾心为广大客户打造卓越的产品与服务。
















