武汉傲睿尔科技有限公司集群无人机飞行仿真系统通过多路AI技术实现机群内的无人机的自动化飞行、任务管理和通信管理功能,通过数据汇聚后统一在三维场景中进行展示,显示内容包括无人机集群总体飞行态势,指定无人机飞行态势和无人机任务执行状态;同时系统提供统一的设置管理界面提供仿真无人机单机设置和机群设置能力,可对指定无人机的数据进行单独设定,并且可以对无人机集群协同方式进行设置;在使用时,操作人员可以使用外部操控设备对指定的仿真无人机进行控制。

产品特点
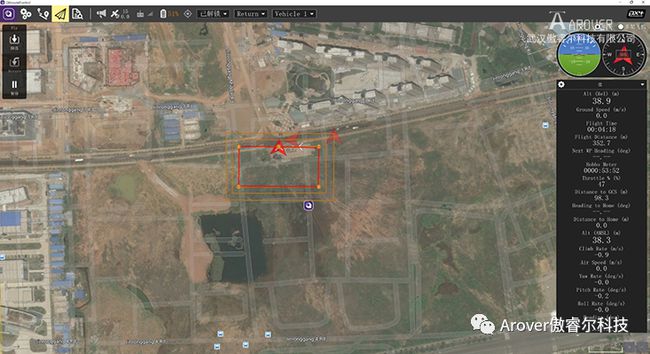
集群无人机仿真场景
场景模型: 系统使用3A级3D引擎营造出逼真的集群无人机飞行场景,对无人机及城市环境等进行精细化建模,环境模型可根据地图实物建筑1: 1还原展示。


集群单机、多机选定控制
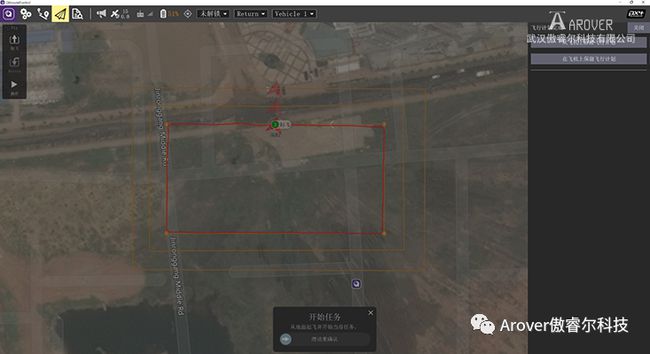
一键起飞、降落:可一键操控集群无人机起飞与降落,操作方便快捷。

位置控制: 可通过航迹规划或手动单控方式对集群单机、多机进行位置控制。

航迹规划:通过在地图中设置航点坐标、航点高度和飞行速度等数据,对集群无人机航线进行任务配置。

编队变换:可设置集群无人机飞行编队,如三角和一字型等,使集群无人机进行编队变换。

集群智能算法:采用集群有中心编队(有人操作中心机编队飞行)与无中心编队(航迹飞行与地毯式搜索)集群智能算法,通过地面站控制指令实现对集群及单无人机姿态位置控制、轨迹控制、载荷控制。
实时通信
实现地面站、仿真系统、显示系统间的实时通信,展示集群无人机实时飞行轨迹及航测数据,如姿态、位置和速度等数据,可根据实时返回数据对集群无人机进行操控。


高协同性:利用集群无人机飞行仿真系统实现复杂环境下高密集性、高协同性和智能化搜索,使侦察更加全面和精准。


关于武汉傲睿尔
武汉傲睿尔科技有限公司成立于2016年,位于武汉市武昌区,是一家长期致力于无人机机巡数据采集、数据展示、数据分析的科技型企业,涵盖无人机航测、平台软件开发、VR/AR行业应用等业务,并拓展至水利、军工等多个领域。
公司产品主要包括高压电缆附件制作工艺仿真培训软件、无人机虚拟巡线仿真系统、电力机巡数据自动识别与处理软件、无人机机载复合绝缘子憎水性检测设备与数据处理软件等,诚招全国各地代理商及合作伙伴!
武汉傲睿尔科技有限公司成立于2016年,位于武汉市武昌区,是一家长期致力于无人机机巡数据采集、数据展示、数据分析的科技型企业,涵盖无人机航测、GIS平台软件开发、VR/AR行业应用等业务,并拓展至水利、军工等多个领域。
公司拥有一支架构合理、创新意识强、文化素养高、互补性强的企业经营、管理、研发团队(硕士及以上学历者占25%),具备较强自主研发能力,完全掌握现有产品核心技术及知识产权。公司通过ISO 9001质量管理体系,公司设有现代化、高科技、多功能的综合电工电气实验室。
公司一直高度重视自有产品的科研开发及自主知识产权的保护,累计申请国家专利11项,软件著作权10项,2018年被武汉市科学技术局评为《武汉市科技“小巨人”企业》,被武汉市软件行业协会 评为“企业信用评价AAA级信用企业”,成为武汉市大数据协会“理事单位”、武汉市软件行业协会“理事单位”,小先后承担包括《基于全景的输电线路多场景AR巡视的研究与应用》、《基于虚拟现实及全景视频的沉浸式飞行避障两栖无人机巡线技术研究及应用》、《基于无人机的劣化绝缘子带电检测技术研究及应用》等各类电力科技(技改)项目近十项,积累了丰富的科技项目运行经验。
公司自创建以来,坚持技术创新、质量可靠、服务优质的原则,倾心为广大客户打造卓越的产品与服务。
















