无人机帮助四足机器人“探路”
2015-10-10 16:01 性质:转载 来源:cnBeta.com
免责声明:无人机网(www.youuav.com)尊重合法版权,反对侵权盗版。(凡是我网所转载之文章,文中所有文字内容和图片视频之知识产权均系原作者和机构所有。文章内容观点,与本网无关。如有需要删除,敬请来电商榷!)
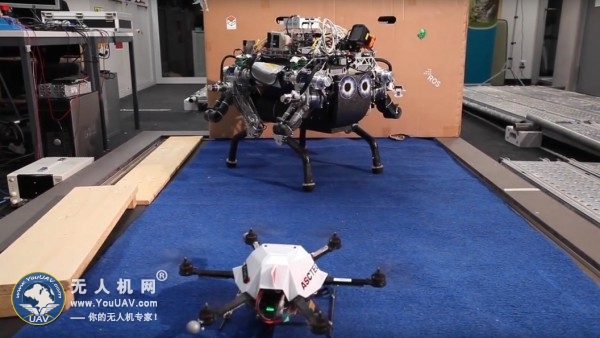
无人机已经被广泛应用于航空拍摄、地图测绘等领域。瑞士苏黎世联邦理工学院 (ETH Zurich)的研究人员最近进行了一项实验,他们利用无人机测绘地图反馈前方道路状况,帮助四足机器人发现潜在的障碍物。
无人机已经被广泛应用于航空拍摄、地图测绘等领域。瑞士苏黎世联邦理工学院 (ETH Zurich)的研究人员最近进行了一项实验,他们利用无人机测绘地图反馈前方道路状况,帮助四足机器人发现潜在的障碍物。以便顺利完成任务。实验开始时,无人机在一个小的区域飞行,同时该区域内的地面上布置了各种各样的障碍物。研究人员也为机器人设置了一个指定起点及目的地。由无人机上的摄像机和其他传感器收集的数据随后被用于测绘出高分辨率地图。研究人员随后利用该地图对地面上潜在的障碍进行分析,如坡度、表面粗糙度和台阶高等度。最终研究人员可以为机器人![]()