用于STEVAL-GMBL02V1参考套件的STSW-GMBL02V1固件在板载STM32微控制器中运行,并且能够以磁场定向控制方式驱动三个电动机,以解码来自电动机的三个位置传感器信号并实现精确的位置控制调节相机方向的算法。
固件同时解码两个不同的惯性测量单元(相机IMU和框架IMU),以分别获取相机和安装板的框架的当前方向。
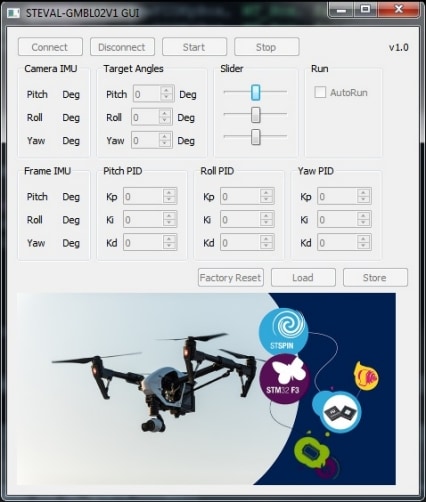
STSW-GMBL02V1 GUI能够通过USB发送命令并从固件获取反馈来与开发板通信。GUI还读取“摄像机和框架” IMU角度信息,启动或停止云台控制,并更改俯仰,横摇和偏航轴的PID调节器。
然后,可以将GUI中修改的任何设置存储在板EEPROM非易失性存储器中。当主板不再与GUI连接时,GUI可以对自动启动功能进行编程以控制云台,并恢复出厂设置。
主要特点
固件:
通过现场控制(FOC)驱动三台电机的固件
支持三个云台电机上的位置传感器(PWM输入)
精确位置控制算法
支持三路单并联电流检测网络
车载惯性测量单元LSM6DSL的解码(帧IMU)
STEVAL-MKI178V1或STEVAL-MKI178V2板上基于LSM6DSL的外部SPI惯性测量单元的解码(用于摄像机IMU)
USB通信,用于与云台GUI进行实时数据交换
应用数据存储在板载2 Kbit串行I2C总线EEPROM中
未连接到GUI时自动启动控制
STSW-GMBL02V1 GUI
启动/停止云台控制
PID调节器的实时设置,用于俯仰,横滚和横摆
设置俯仰,横滚和偏航的目标角度
显示测量的摄像机和框架IMU角度
在Flash中保存和加载应用程序数据
恢复出厂设置