1)处理器 STM32F427 VIT6 32位ARM;
2)晶振 24MHz 精度 15ppm
3)传感器: · 三轴加速度计/陀螺仪;
· 16位陀螺仪;
· 14位加速度计/磁力计;
·气压计 ;
·双加速度计(消除1KHZ 共振);
·双陀螺仪;
·双罗盘 (一个内置一个外置) ;
·双GPS 基于锁定状态和星数选择切换(或更复杂的切换机制、并可对比测试性能);
4)128K 非易失闪存
5)通用电平驱动芯片(USART、舵机输出),隔离/增强驱动;
6)高性能电源管理芯片
7)可外接数字差压空速计 (6.6V ADC 输入)
8)超声波传感器;
9)激光测距传感器;
10)三个LED灯和三个按钮开关;
11)一个可调模拟电压输入输入;
12)外接交流电220V 50Hz
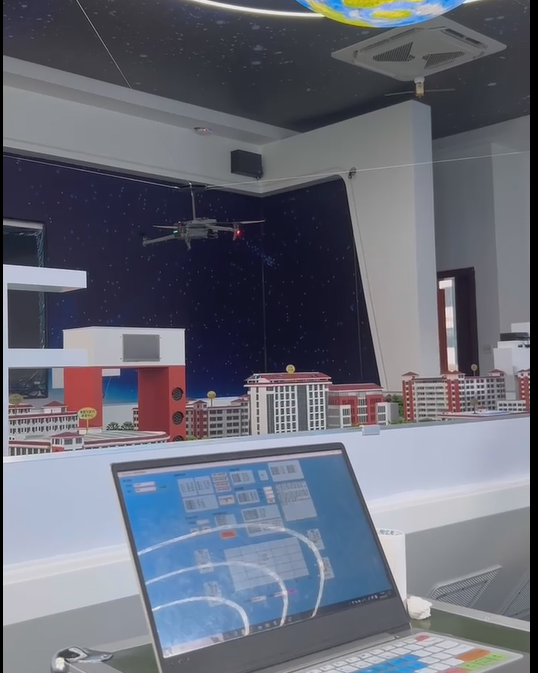
13)实验箱内,集成可升降支架,偏航范围360°,俯仰、横滚范围 ±30°;
14)带有仿真及USB下载接口;
15)外接USB接口;
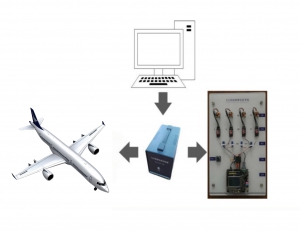
16)带有无线数传电台和地面站或实验计算机通讯;
17)标准的遥控器,可控制四旋翼无人机;
18)SD卡(用于记录数据和开发)
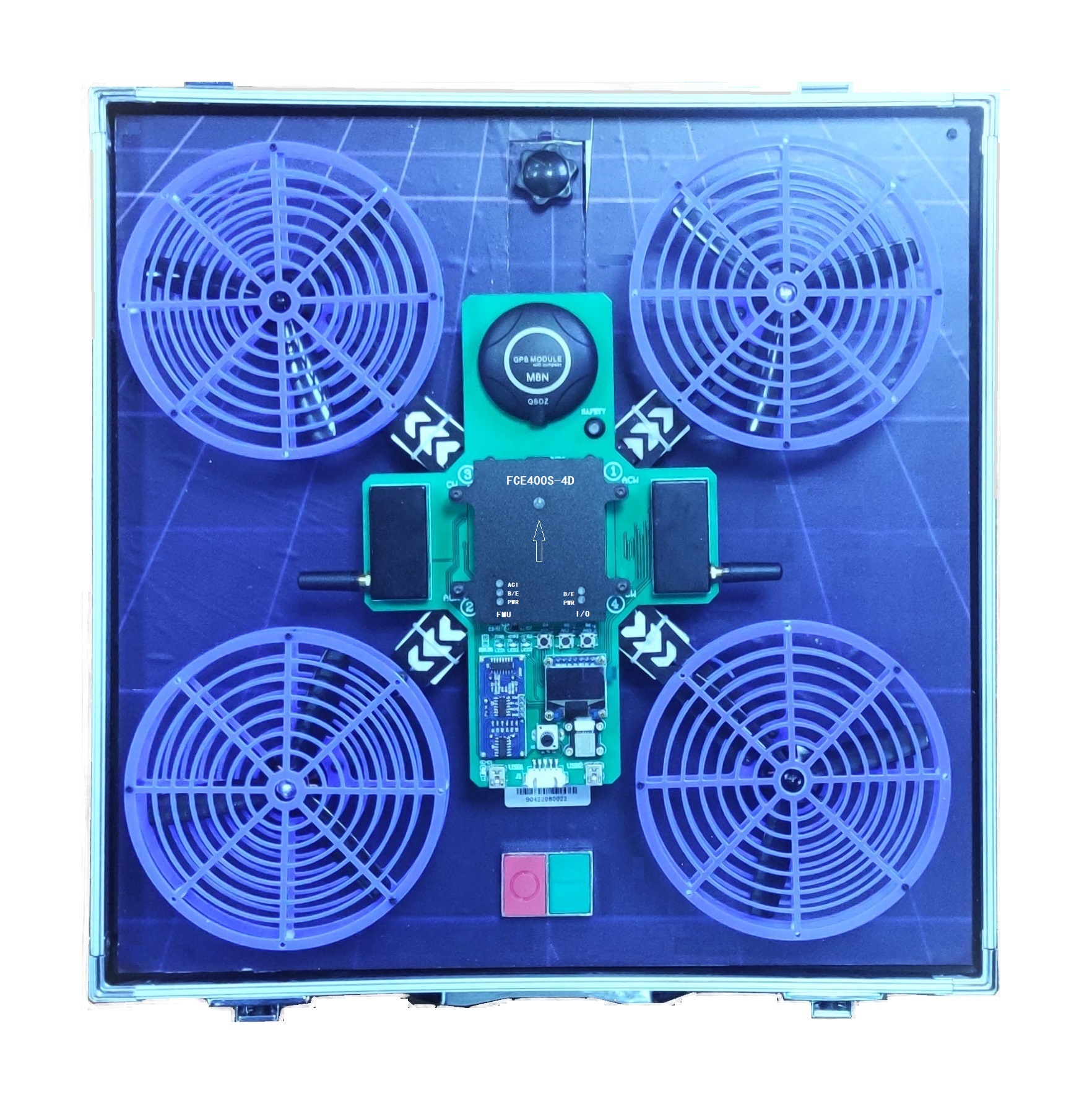
四旋翼无人机飞控教学实验系统(FCE400S-4D)包含四旋翼无人机飞控实验箱、测控计算机系统等,其中一体化四旋翼无人机飞控实验箱既支持进行单片机相关课程教学使用,主要用于无人机飞行控制系统的相关实验内容,从简单到复杂,适合学生入门到提高使用。
1)基础实验
(1) 流水灯实验:由若干发光二极管组成,可以完成I/O 驱动相关实验;
(2) 蜂鸣器实验:由一个无源蜂鸣器及其驱动电路组成;
(3) 键盘及外部中断实验:由若干按键组成,可以做按键实验,同时用于外部中断实验;
(4) 定时/计数器实验:定时器和计数器实验;
(5) 串口通信实验:由一个RS232驱动芯片和接口组成,用于串口通信实验;
(6) IIC通信实验:连接采用I2C 通信协议的元件,用于IIC 通信协议相关实验;
(7) SPI通信及液晶屏显示实验:连接采用SPI通信协议的 LCD 屏组成,用于SPI通信协议相关实验;
(8) A/D采集实验:由一路可变电阻组成,通过调节电阻值改变电压输出,用于A/D采集实验。
2) 传感器实验
(1) 陀螺仪实验:掌握基于 MEMS 技术陀螺原理、编写驱动获取三轴陀螺仪数据,学习如何配置量程、获取角速率原始数据、转化为实际角速率,实时显示;
(2) 加速度计实验:掌握加速度计测量原理、编写驱动获取三轴加速度计数据,学习如何配置量程、获取加速度原始数据、转化为实际加速度值,并实时显示;
(3) 磁力计实验:掌握磁力计原理,编写驱动获取磁力计数据,并计算磁航向;
(4) 气压高度实验:掌握气压计原理、如何利用气压计算当地海拔高度,获取气压数据并计算高度,并将实际数据发送到测控计算机,实时显示;
(5) 超声波实验:掌握超声波测距原理,编写程序实现超声波测距,并将实际数据发送到测控计算机,绘制成曲线,实时显示;
(6) 激光高度测量实验:掌握激光测距原理,实现激光测距,并将实际数据发送到测控计算机, 绘制成曲线,实时显示;
(7) GPS实验:掌握 GPS 原理,学会使用 u-center 软件,熟悉 NMEA-0183 协议,UBX 协 议,编写程序解算 GPS 数据,并实时显示位置;
(8) 电流电压检测实验:通过电流计电路和电压采集电路采集电源电流和电压。
(9) 电机控制实验:熟悉无刷电机驱动和控制,了解PWM调速的原理;
(10) 姿态测量实验:姿态测量数据采集及分析;
(11) 姿态解算实验:四元数法和旋转矢量法;
(12) 卡尔曼滤波高度融合实验:了解卡尔曼滤波原理,实现卡尔曼滤波算法,完成高度轴上 的位置与速度数据的获取;
(13) PID反馈控制实验:了解反馈控制基本概念,PID 控制原理,通过编程实现无人机姿态 PID 控制;
(14) 基于双闭环PID的无人机姿态控制实验:双路PID控制,无人机姿态控制原理实验;
(15) 模拟飞行实验:了解无人机手动模式下,手持比例遥控器指令如何转化为无人机电机转 指令,四轴无人机电机控制指令是如何叠加,并编程实现,实现通过遥控器控制无人机 前、后、左、右,上下运动。