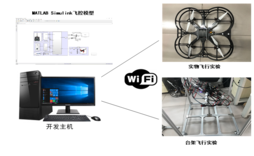
| 四旋翼实验台 | Links-UAV-LargeBench | 四旋翼无人机实验台,包括一架四旋翼无人机和无人机实验台架。无人机实验台架通过万向节与无人机连接,能够完成四旋翼无人机在实验内的姿态控制调试实验。
实验台架:尺寸80cm*80cm*100cm;
飞机尺寸:520mm*520mm*220mm,带碳纤防护框;
起飞重量:1.8Kg,其中空机1.0Kg,负载重量0.8Kg;
续航时间:空机不小于15分钟;
飞控:采用STM32F427(180MHZ)主控及STM32F100协处理器,内置三组IMU冗余设计,5路UART,1路I2C,PPM/SBUS遥控器输入,1路ADC,12路PWM;
视觉处理板:CPU选用ARM cortex-A53四核64位@1.4GHz,1G内存,双频WiFi接口,千兆以太网,40PIN GPIO可扩展SPI、I2C、UART等接口;
单目镜头:USB接口,720p 30fps,视野60度。 | 灵思创奇 |
| 飞控代码自动化生成工具 | Links-AutoCoder-Gen | 代码生成工具Links-AutoCoder-Gen集成在MATLAB软件中,它用来完成Simulink模型到目标代码的转换和编译。 | 灵思创奇 |
| 飞控外设模型库 | Links-AutoCoder-DevLib | 外围设备模型库Links-AutoCoder-DevLib集成在MATLAB软件中,包含传感器、执行机构、图像处理、图像采集、定位等模块。 | 灵思创奇 |
| Simulnk实验示例包 | Links-UAV-SimulinkDemo | 实验课程基于MATLAB Simulink开发,能够覆盖姿态控制和视觉定位两个方向,包括四旋翼完全匹配的Simulink仿真模型(含视觉导航、姿态控制、飞机动力学)和实验指导书 | 灵思创奇 |
| 实验桌 | 定制 | 1.2米宽,0.75米高,桌面放置开发主机 | 灵思创奇 |
| 开发主机 | 刃7000 | CPU:I7-9700八核3.0GHz;内存:8GB DDR4;硬盘:512GB SSD;显示器:23英寸;显卡:GTX1660,6G显存 | 联想 |
































_无人机网(www.youuav.com)")
_无人机网(www.youuav.com)")
_无人机网(www.youuav.com)")


