
AH-1 简介
安航沙漠鹰以安航飞控MP300为核心进行系统集成、深度优化,专注于小面积航测,主要应用在矿业采集、精准农业、应急响应、建筑地籍、考古等方面。安航沙漠鹰 使用简单、高效的方式 提供专业的 DEM 和 DOM 。


1.1 技术参数
|
飞机组成部分 |
机翼 |
定制1.7米EPO |
|
机身 |
EPO 泡沫、碳纤维框架&复合材料部件 |
|
|
电池 |
16.8V,10000毫安时4S纳米锂聚合物电池 |
|
|
飞行控制系统 |
安航AH-MP300自动驾驶仪 |
|
|
电台 |
安航电台(500mw) |
|
|
相机 |
有效像素为2000万以上 |
|
|
遥控器 |
Futaba2.4G |
|
|
动力系统 |
电子调速器、螺旋桨,300W 无刷直流电动机 |
|
|
主要技术参数 |
气动外形 |
后推式 |
|
空机重 |
1.5KG |
|
|
最大起飞重量 |
2.8KG |
|
|
飞行高度 |
100-2000米(海拔) |
|
|
起飞方式 |
手抛起飞 |
|
|
降落方式 |
手动或自动滑行降落;伞降 |
|
|
额定巡航速度 |
40-90 公里/小时(11-25 米/秒) |
|
|
飞行控制距离 |
半径20公里 |
|
|
飞行时间 |
空中有效40—60 分钟 |
|
|
飞行方式 |
自动起飞降落,空中自动驾驶 |
|
|
航程 |
60KM |
|
|
Gps |
2.5米精度 |
|
|
巡航速度 |
50-60km/h |
|
|
横滚角 |
正负3度内 |
|
|
倾斜角 |
正负3度内 |
|
|
最大范围(单次飞行) |
5 平方公里(海拔 754 米) |
|
|
地面采样距离 |
最小 3.0厘米每像素 |
|
|
相对正摄影像图/3D模型精确度 |
1-3x 解析度 |
|
|
起降抗风能力 |
5级 |
1.2 包装内容
★ 航测无人机(包括所有电子部件&内置自动驾驶仪)
★ SONY A5000L 配 35mm 镜头(包括 16GSD 卡、电池、USB 数据线&充电器) FUTABA遥控器&附件
★ 数传模块&增益天线
★ 2块锂聚合物电池&充电器
★ 备用螺旋桨
★ 便携箱
★ 用户手册
★ 软件包(飞行计划&控制)


2.调试飞行
2.1 选择飞行场地
1.选择一个空旷的区域进行飞行,禁止在人口密集区域、机场、军事基地等敏感区域飞行。
2.观察风向,选择适合飞机起飞和降落航线,起降航线上不能出现障碍物遮挡。
3.观察风速,6级以上飞速不建议飞行。

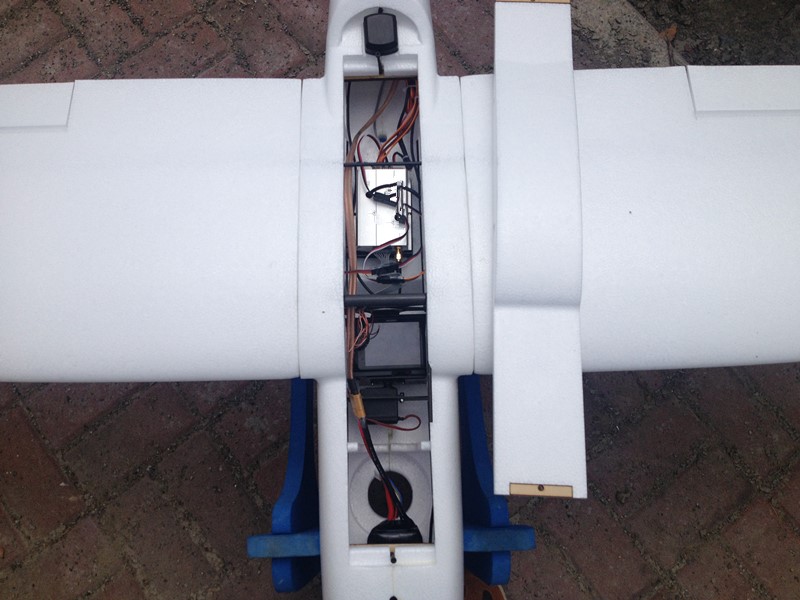
2.2 组装飞机
1.装好飞机的机翼和尾翼部分,检查接线是否牢靠,拧紧固定螺母。
2.检查电机、舵机、桨叶是否有松动和损坏。

2.3 飞前上电检查
1.检查电池电压是否正常。
2.连接飞机电源,打开遥控器电源,切换到手动模式,检查飞机的方向舵面是否正确; 更换到 UAV 模式,检查飞机自稳的舵面是否正常;测试油门最大推力有无异常。
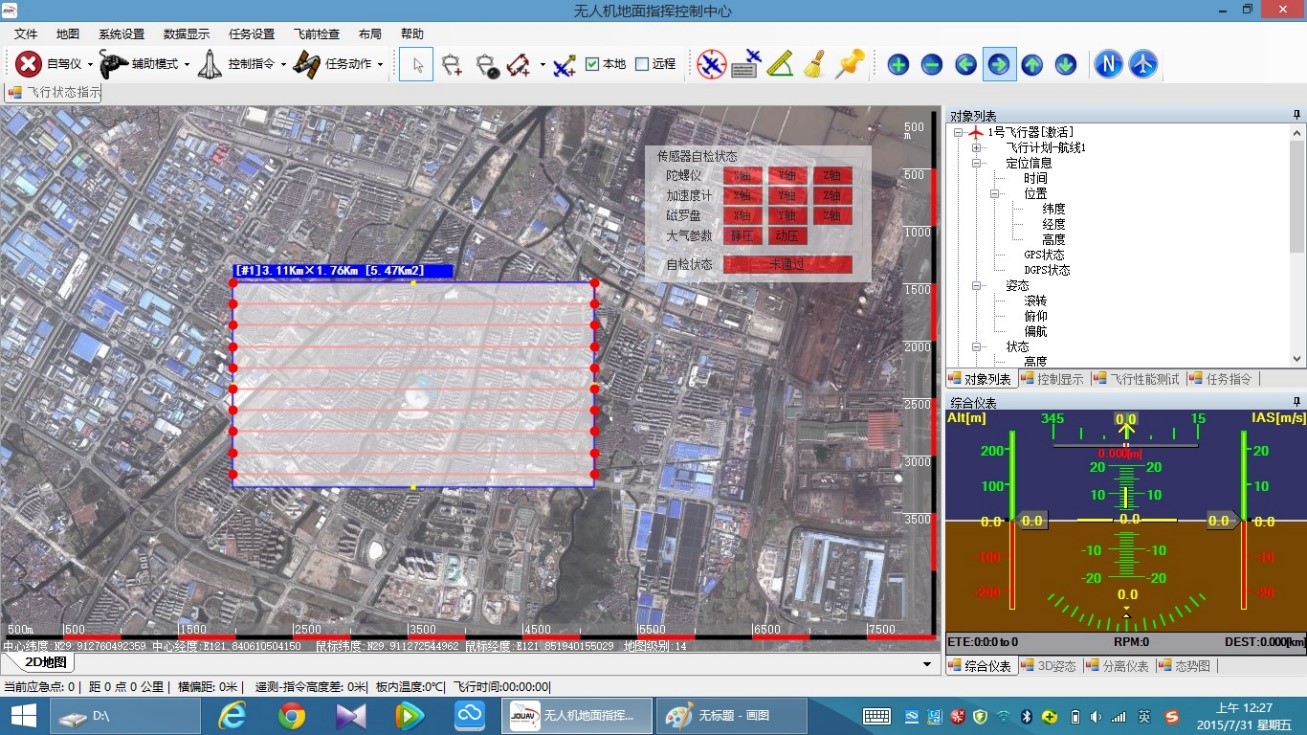
2.4 规划飞行任务
1.使用地面站软件的测绘功能规划飞机的飞行任务,设置飞行高度、速度、航线等信息。
2.规划好飞行任务后,一定要点击“写入航点”。

2.5 起飞过程

2.6 降落过程
飞机完成自动飞行任务后,自动返回“HOME点”,并在上空持续盘旋,操作手把遥 控器切换到手动模式,逐渐盘旋下降,对准跑道,逆风降落。

3.地面站软件部分:
3.1 安装软件
点击安装软件。安装完成后,连接数传,打开软件快捷键,系统自动地安装驱动,稍等一会即可完成。
3.2 规划航线
3.3 导出数据
点击飞行数据界面下载最近的飞行POS点和 飞行日志。
沙漠鹰AH-1型无人机航拍测绘系统配置清单及价格
|
序号 |
配置清单 |
型号和规格 |
数量 |
报价 |
|
标准配置 |
||||
|
1 |
AH-1型无人机飞行平台 |
主要包括机身结构、舵机、动力系统、电源系统、伞降系统 |
1套 |
万 |
|
2 |
飞行控制系统AH-UAV |
包括飞控硬件、数传电台、GPS、转速传感器、转速传感器连线,发射接收器(发射机、接收机) |
1台 |
万 |
|
3 |
实时测绘系统AH-CH1 |
SONY A5000L 配 35mm 镜头 |
1套 |
万 |
|
4 |
地面监控系统AH-GMP |
包括地面监控硬件(地面遥控器、数传电台、笔记本电脑及监控箱)、地面监控软件、地面站天线、监控地面站操作手册等 |
1套 |
万 |
|
售后服务 |
||||
|
5 |
售后服务 |
设备质保期一年,质保期内因设备质量引起的问题免费维修或更换。 |
1年 |
- |
|
|
总计(万元) |
万元 |
||










