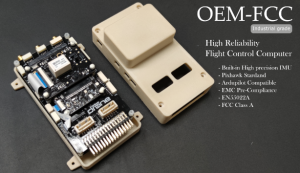
一款参照Pixhawk设计标准与兼容Ardupilot飞控
- 内建高精度IMU
- EMC预测试项目:
EN55022A
FCC Class A
- 电路设计与制造地: 台湾
欢迎联系索取datasheet型录, 微信: 13201588229
Processor
- 32-bit ARM Cortex M7 core with FPU
- 480 MHz / 2 MB Flash
- TCXO
Sensors
IMUs:
- ADIS16470:
Gyroscope:
8°/hr in run bias stability
0.008°/sec/√Hz rms rate noise density
Accelerometer:
Triaxial, digital accelerometer
dynamic range: ±40 g
13 μg in run bias stability
- BMI088 6-Axis MEMS IMU
- ICM-20649 6-Axis MEMS IMU
Barometer
- MS-5611 x 2 (High resolution 10 cm)
Compass
- PNI RM3100 (Military-grade)
- IST8307
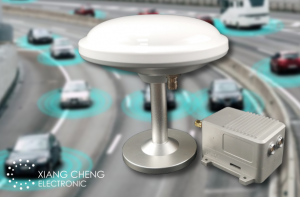
GPS
- Built-in ublox F9P RTK GPS
Telemetry
- Built-in RFD900 (915MHz)
Power
- Maximum Voltage Input: DC +6.5V
(Optional AEC-Q100 Qualified DC Power Module:
Power Input DC 4.5V to 55V)
- All peripheral outputs over-current protected,
all inputs ESD protected
Interfaces
- PWM 14 (PWM x 8, AUX x 6)
- Telemetry x 2 (TELEM1 built-in RFD900)
- CAN x 2
- USB x 1
- I2C x 1
- SPI x 1
- SPKT x 1
- GPS x 2 (GPS2 built-in ublox F9P)
- GPS PPS out
- Futaba S.BUS input
- PPM sum signal
- RSSI Input
- 3.3V and 6.6V ADC inputs
Dimensions
- Length 112.80 mm (4.44")
- Width 77.20 mm (3.04")
- Height 46.30 mm (1.83")
- Weight 360 g (13.75 oz)
")