
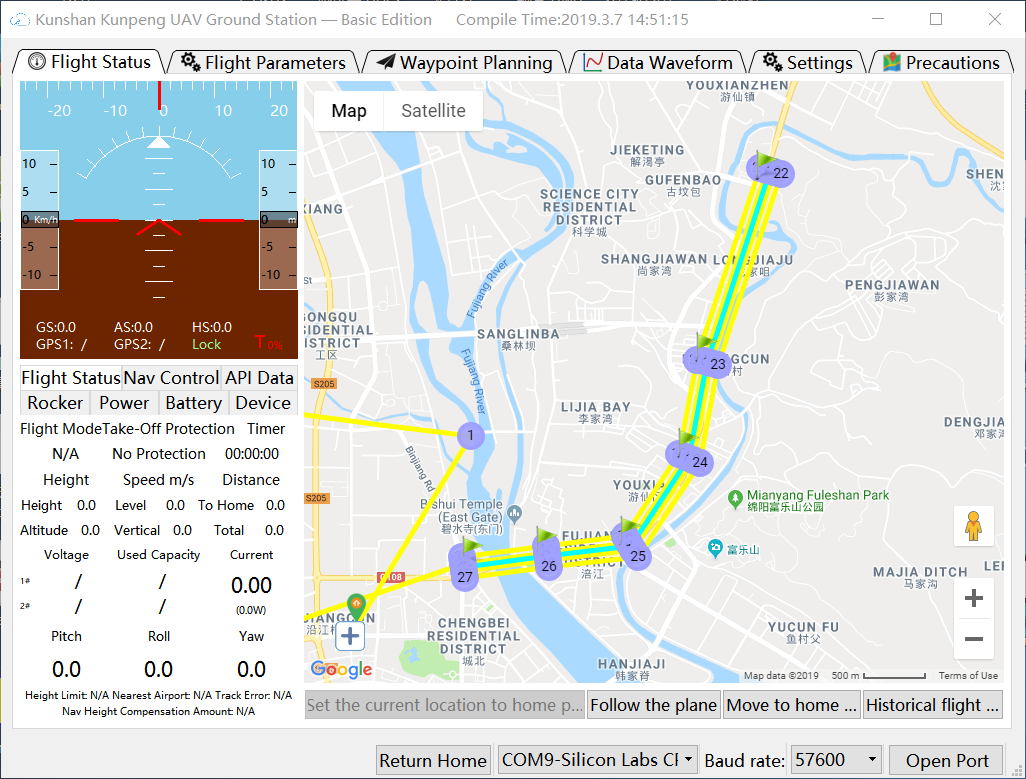
基础版 — GoogleMaps引擎(支持半离线状态)
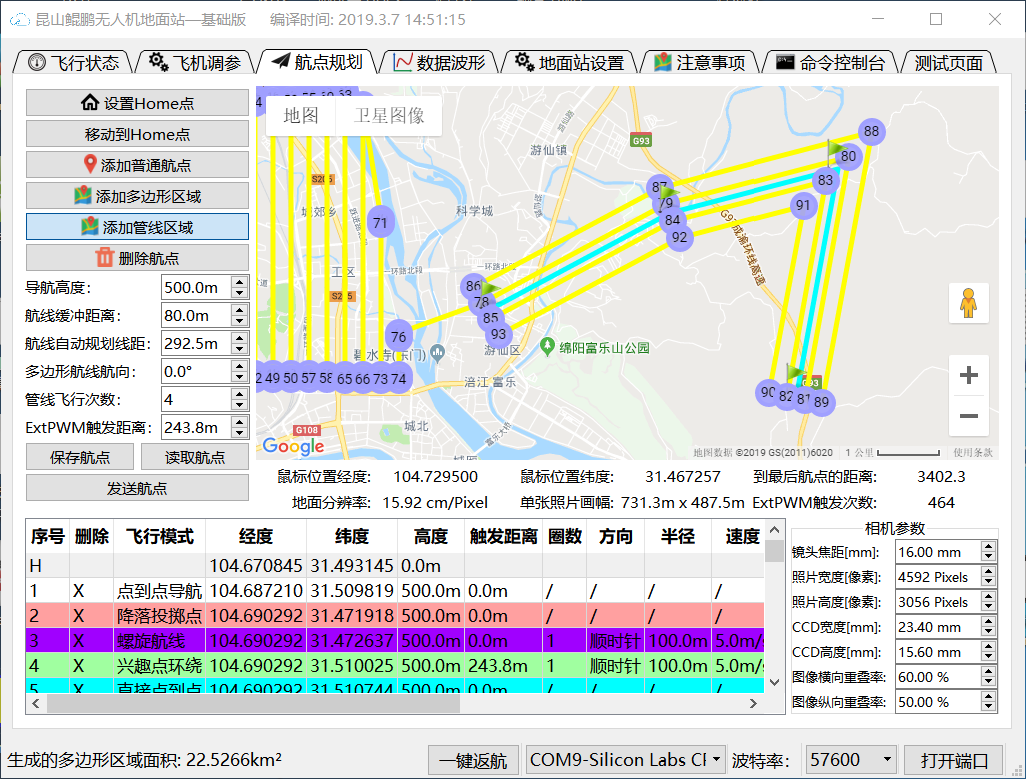
基础版 — GoogleMaps引擎(支持半离线状态)

专业版 — OpenLayers引擎(支持完全离线状态)
(仅供专业版飞行控制系统使用)
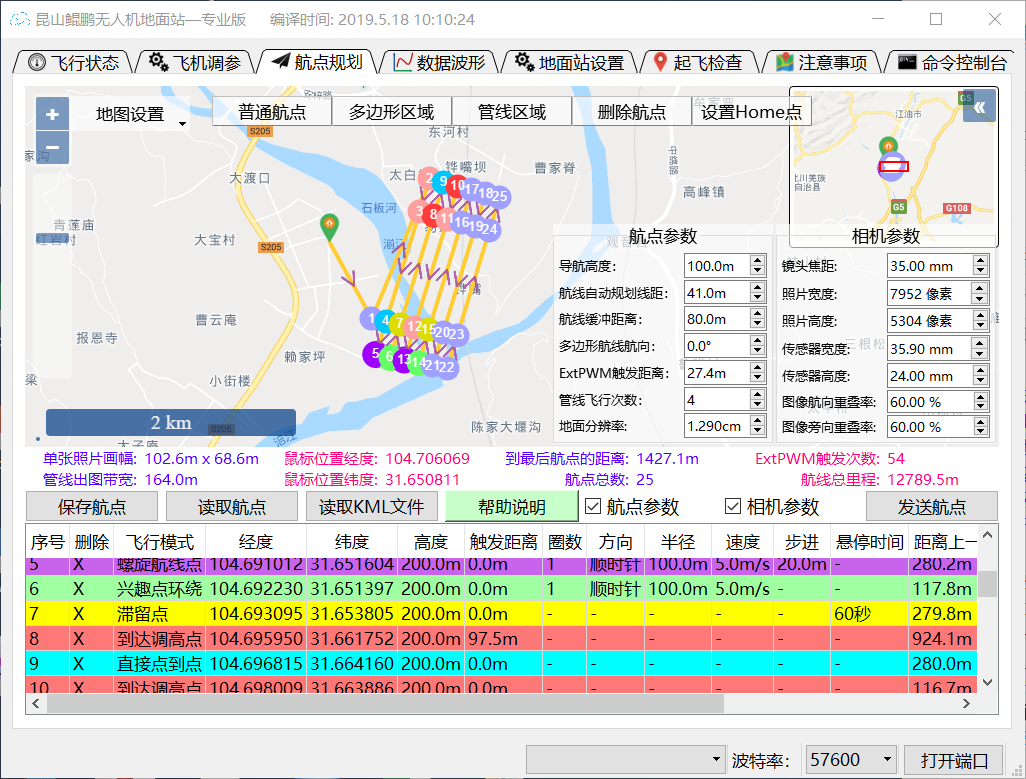
专业版 — OpenLayers引擎(支持完全离线状态)
(仅供专业版飞行控制系统使用)
|
对比项目 |
基础版 |
专业版 |
|
地图引擎 |
GoogleMaps |
OpenLayers |
|
离线地图 |
半离线(需要联网加载地图引擎) |
完全离线 |
|
使用流畅度 |
一般 |
流畅 |
|
导入KML文件 |
不支持 |
支持 |
|
实时更改地图语言 |
不支持 |
支持 |
|
导出文本格式航点列表 |
不支持 |
支持 |
|
地图鹰眼图 |
不支持 |
支持 |
|
高级导航控制功能 |
不支持 |
支持 |
|
帮助向导及示意图 |
不支持 |
支持 |
|
可编辑飞行检查清单 |
不支持 |
支持 |
|
支持飞行模式 |
6种 |
8种 |
|
地图显示飞机状态信息 |
不支持 |
支持 |
地面站软件使用说明书:

使用说明书 地面站 A5尺寸.pdf(4.14 MB)
运行平台:x64 Windows PC(Windows XP以及以上)
地面站支持语言:简体中文 / 繁體中文 / English
地图支持语言:简体中文 / English / Español / العربية / اردو
通信方式:USB转TTL串口(鲲鹏无人机数据通信协议,不兼容MAVLink,详细信息请至"资料下载"界面下载<飞行控制器串口数据协议说明书.pdf>)
航点列表容量:1000(单次最多可向飞控系统发送250个航点)
离线地图:基础版支持半离线地图模式(需要联网加载谷歌地图引擎以及事先下载目标区域的瓦片地图,之后便可完全离线使用)
专业版支持完全离线地图模式
地面站软件所需最低系统配置:
CPU:主频/睿频≥2.0GHz 线程数≥2线程
内存:2GB
硬盘:4GB剩余空间(必须为固态硬盘)
显卡:显存≥512MB,显卡核心性能水平达到如下显卡芯片天梯图1X性能倍率以上
https://www.xiazaiba.com/uploads/editor/2018/0925/water_2018092518344874524.jpg
地面站软件推荐系统配置:
CPU:Intel酷睿架构/AMD Zen架构单核主频/睿频≥3.0GHz线程数≥4线程(影响航点生成/修改计算速度,最多使用6线程)
内存:8GB
硬盘:20GB剩余空间(必须为固态硬盘)
显卡:显存≥1GB,显卡核心性能水平达到如下显卡芯片天梯图10X性能倍率以上的显卡均可(影响水平移动地图时的流畅度)
https://www.xiazaiba.com/uploads/editor/2018/0925/water_2018092518344874524.jpg
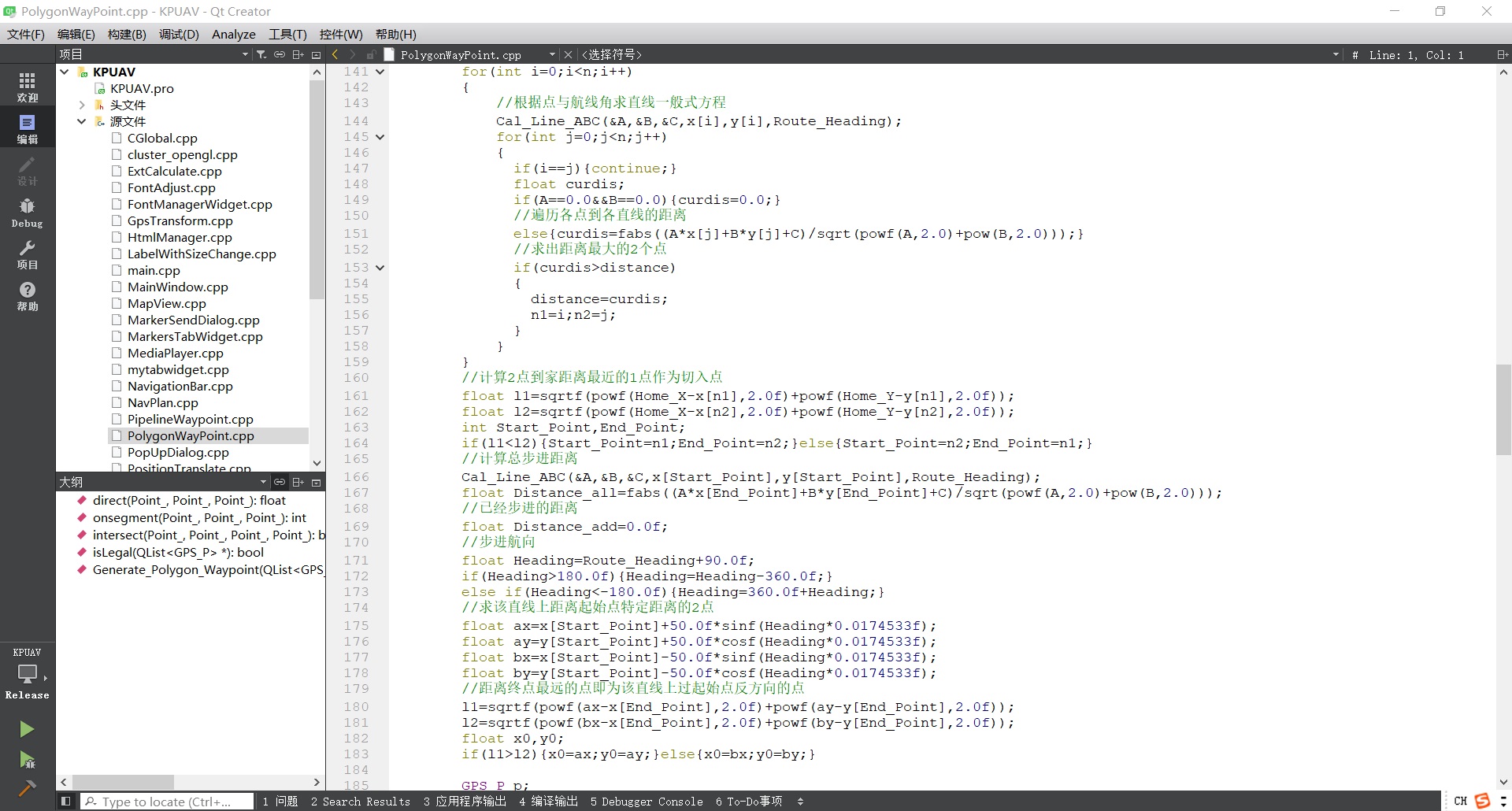
地面站部分源码展示
(我公司飞行控制系统历时6年自主研发,绝非PX4、APM、PPZ、QGroundStation、MissionPlanner之改版)
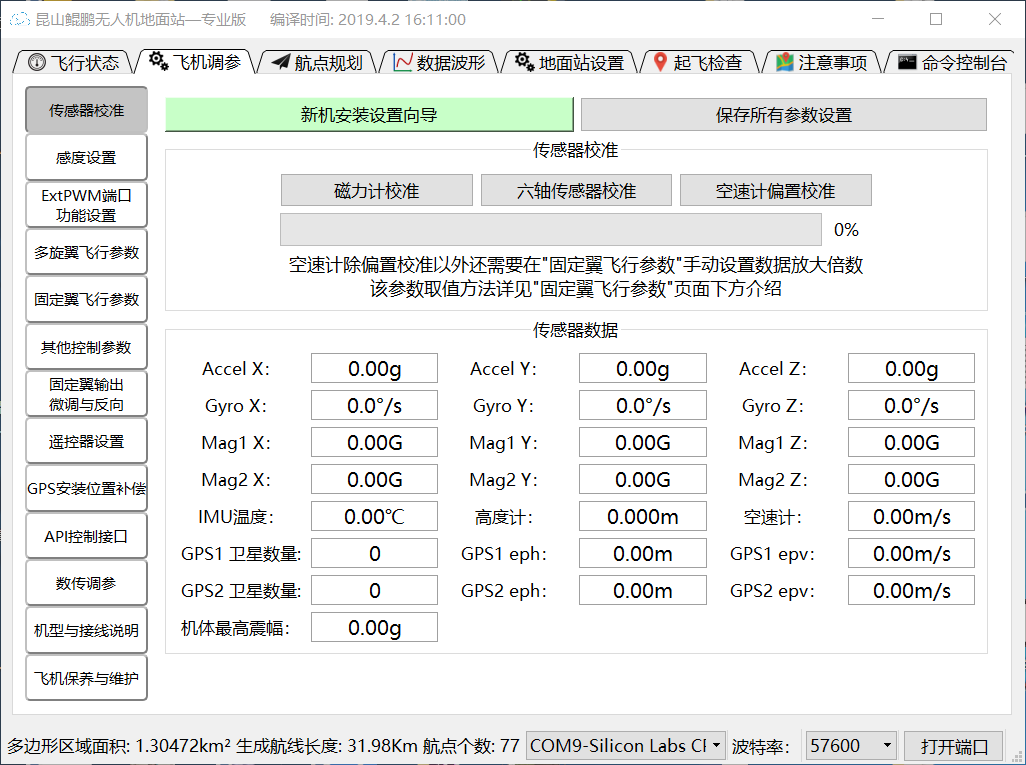
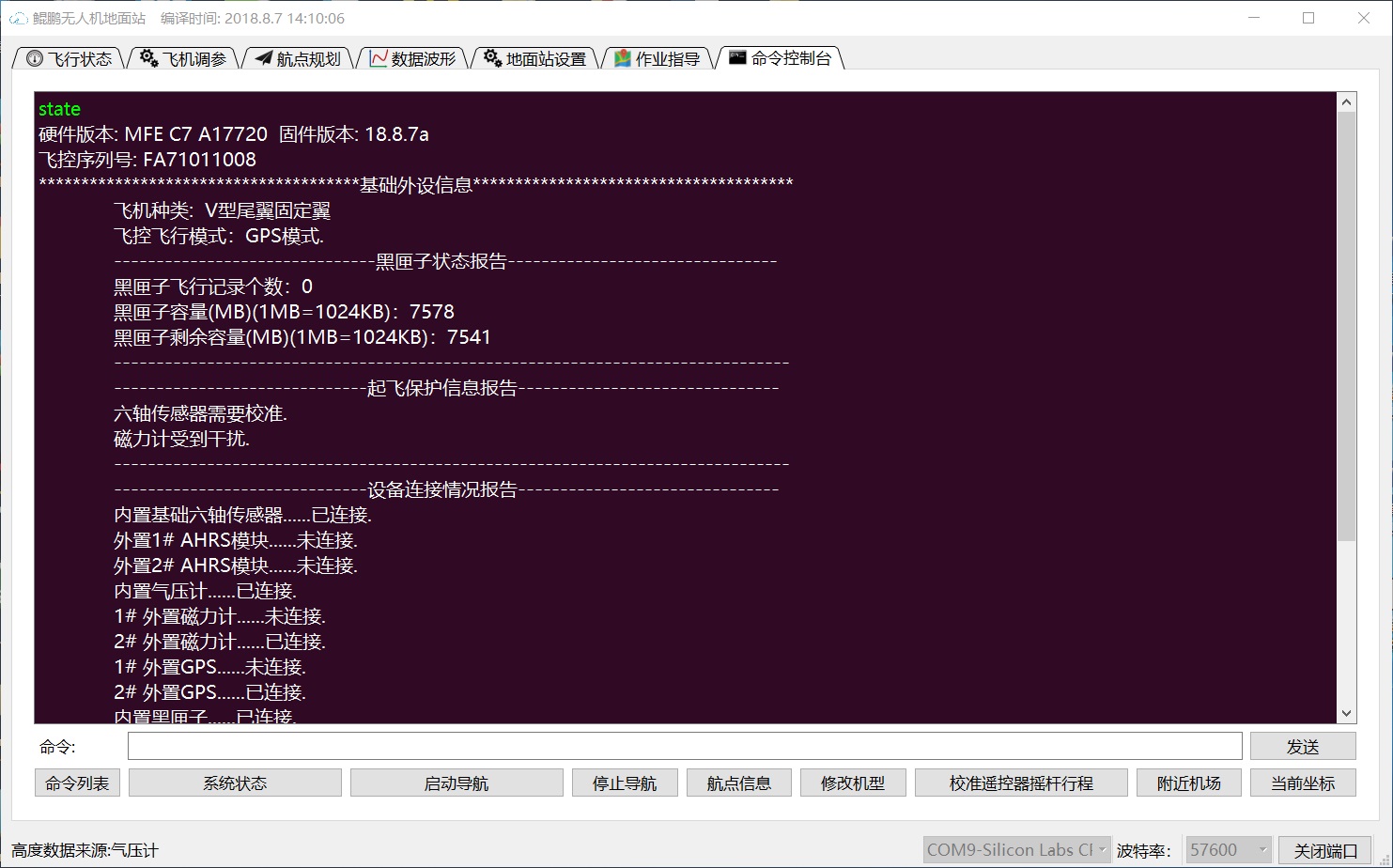
地面站无人机在线调参/传感器校准
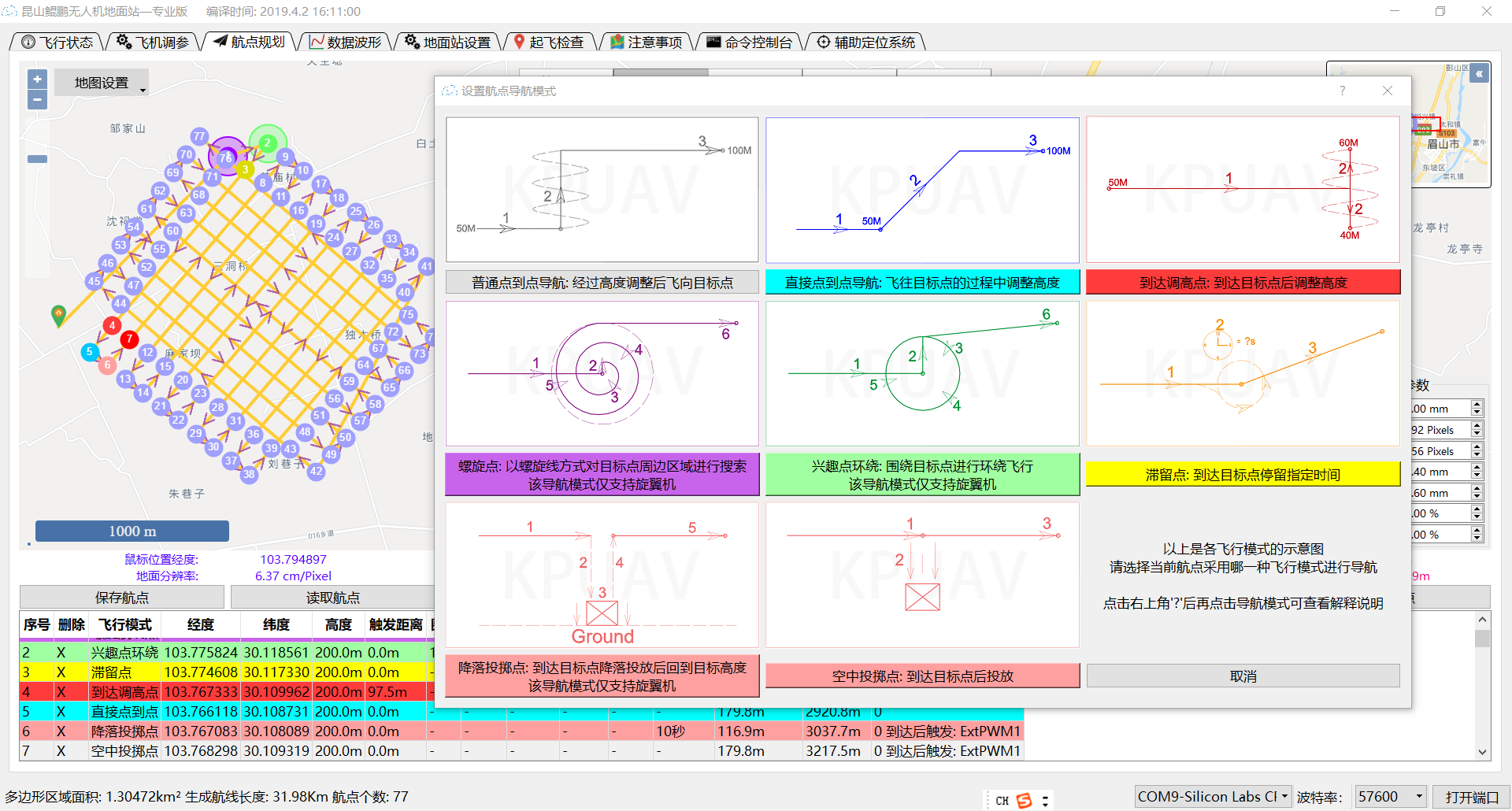
地面站特殊飞行功能规划
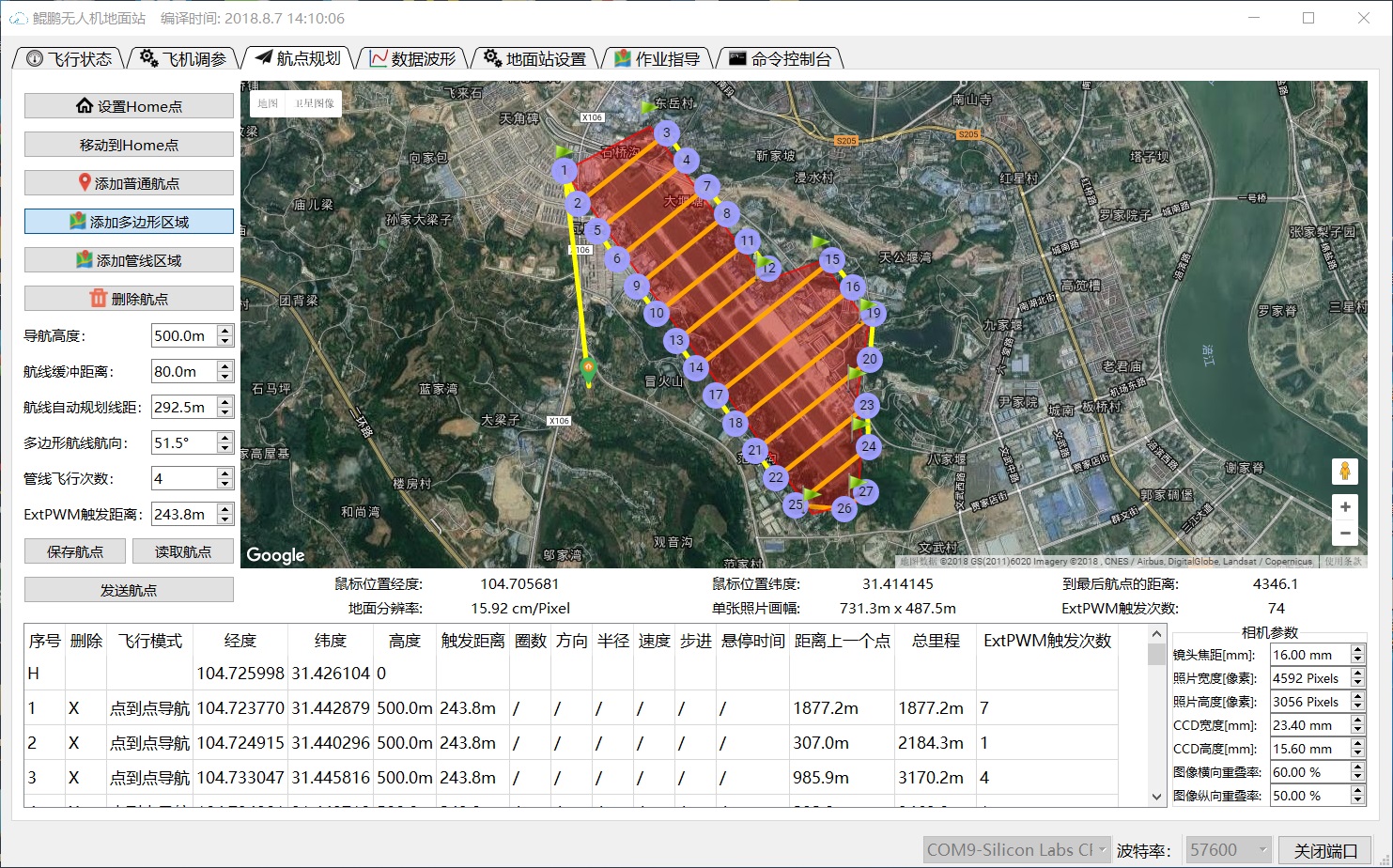
地面站自动生成多边形区域航线
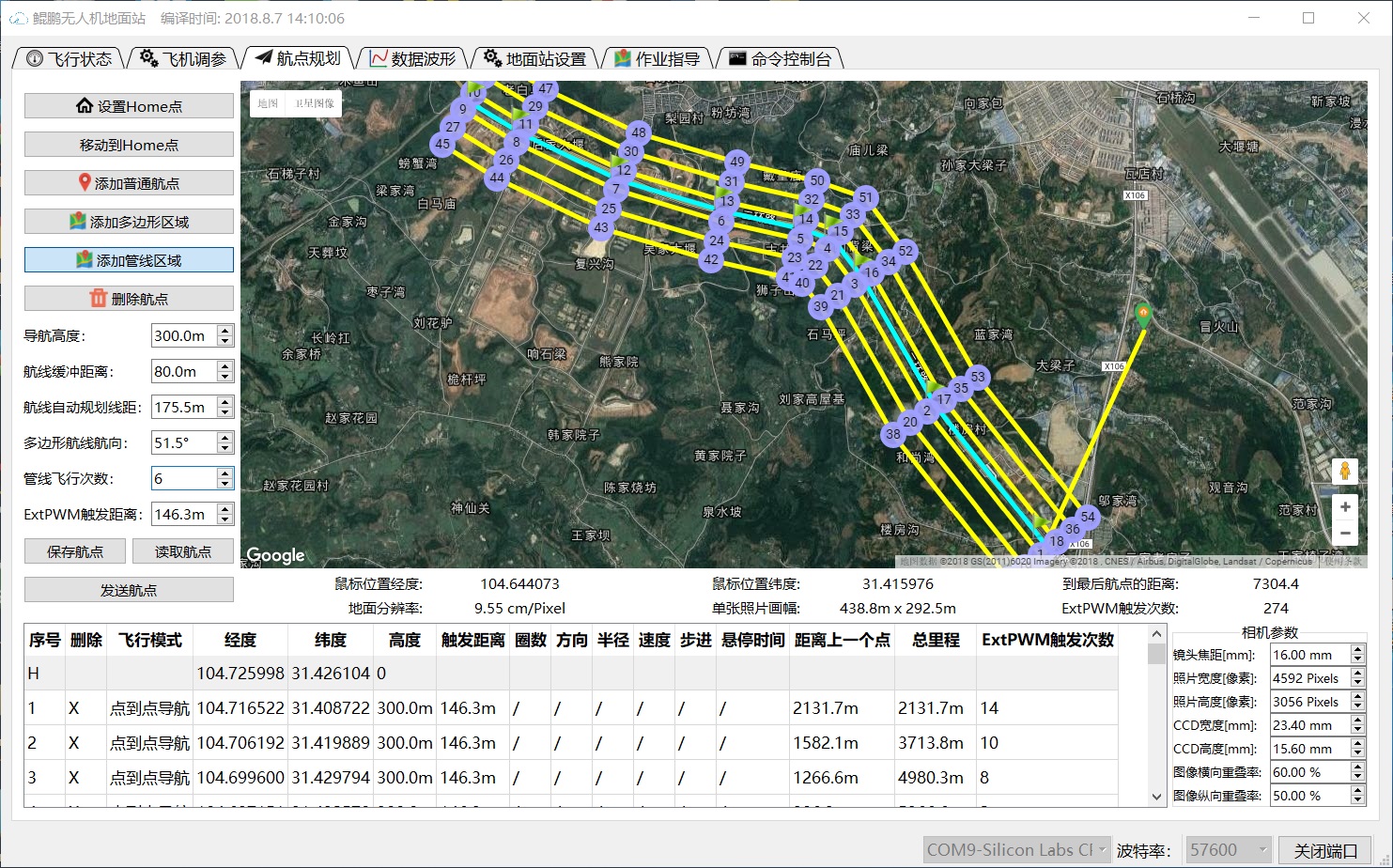
地面站自动生成管线巡逻航线
地面站人机交互功能


























")


