
MAVLink兼容的地面控制站(GCS)从头开始构建,并考虑到商业运营。基于Android构建,不仅支持选定的消费者平板电脑,还支持市场上的一系列工业平板电脑。对于非飞行员和专业人员来说,规划和监控任务从未如此简单。
直观的飞行计划
创建和修改飞行计划从未如此简单。点按并拖动以创建和编辑您的飞行计划或调整地图。专为混合动力垂直起降设计,包括自动飞行模式转换支持。
翻转到3D视图以调整您的态度并预览您的飞行计划或根据世界范围的地形模型自动更正飞行计划。从一系列飞行计划模型中进行选择,包括:测量,垂直扫描,轨道,缩小等等,从而加快速度。
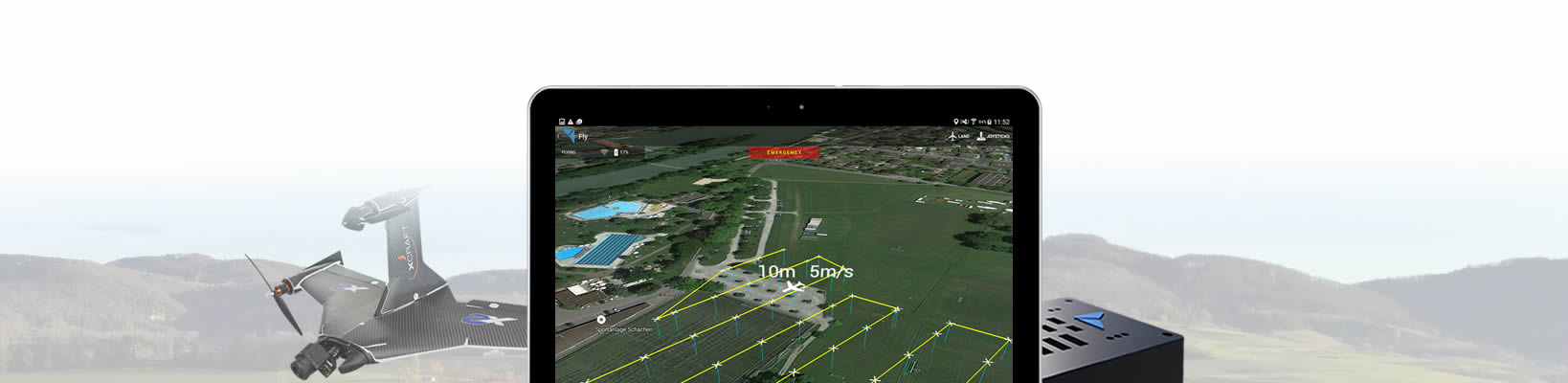
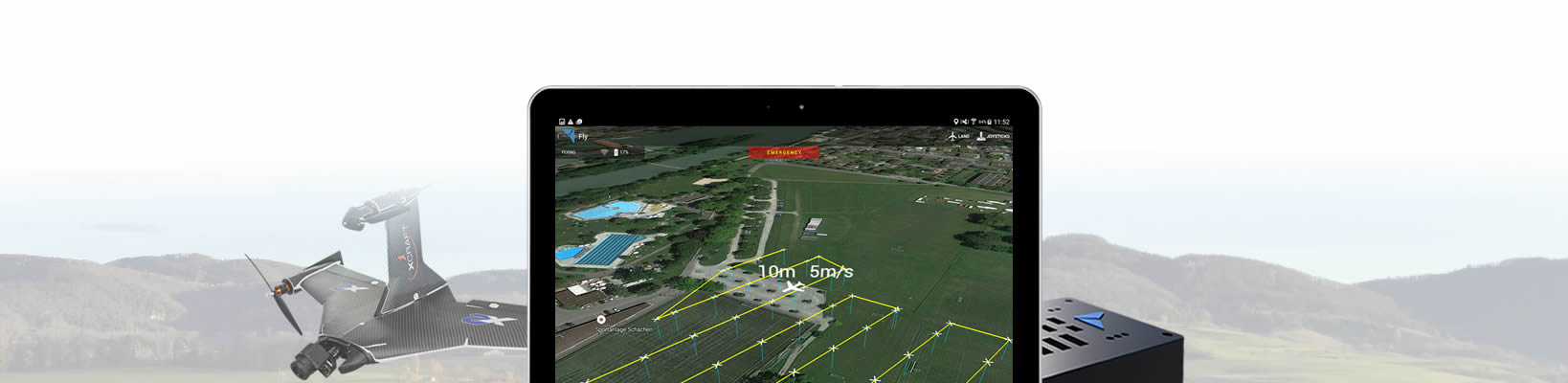
3D飞行视图(HUD)
当您观看无人机沿着其飞行路径行进时,跟踪您在3D中的任务进度。飞行模式提供了一个整洁的视图和简单而有力的方式与无人机及其任务交互,而不会使操作员超载。
测量 - 简单创建,专业成果
创建调查可以像从可用调查类型列表中选择调查类型一样简单,拉伸以适合要映射和飞行的区域。对于更高级的需求,您可以在地图上绘制轮廓,更改高度,选择相机模型,更改重叠,旋转测量运行方向等等。
目前有四种主要的调查类型(可根据要求进行扩展)。最基本的调查适用于较小的无人机。还有更先进的调查设计了更大的固定翼和混合垂直起降飞机以及具有大转弯半径的搜索网格测量。
相机触发模式可以是定时的或基于距离的,其将发信号通知支持相机触发装置之一,例如Seagull Map产品之一,以触发相机快门。
对于所有测量,您可以通过地形调整运行创建的测量,该测量将调整沿测量的个别高度以匹配底层地形,或者,调整整个测量腿以获得沿地形剖面的水平步长。
从基本模式到专业操作员模式
当您外出工作或更高级的模式来管理系统时,请选择简单,有限,整洁的操作员模式。在每个用户模式下使用密码保护来限制组织内操作员对每种模式的访问。
远程管理
定义运营商角色,配置有效负载,管理密码,更新无人机配置,批准和分发来自基于中央网络的车队管理系统的飞行计划。设置将自动下载并在平板电脑下次上线时应用。
飞行前安全检查
在任务开始之前,您的无人机和飞行计划必须健康。一系列飞行前安全检查(可选择是可安装的)将通过一系列平板电脑支持的步骤,以确保系统在允许起飞前100%运行。
保存并分发飞行计划
保存您创建的航班计划,或从航班计划库中选择一个。由计划类型和位置组织,使您可以轻松找到所需的计划。飞行计划将与车队管理系统同步,并可与同一组织内的其他用户平板电脑共享。
易于维护和飞行期刊
每个航班的日志将自动从无人机收集(需要WiFi或蓝牙)并自动上传到车队管理系统,在那里将生成报告并更新航班日志。
无人机的固件更新将与新的平板电脑应用程序更新捆绑在一起,并且可以通过无线方式完成。
遥测和视频链路分集
为遥测数据和实时嵌入式视频内容链接提供了广泛的选项。支持蓝牙中继,FTDI遥测无线电和WiFI(UDP到接入点或桥接)。
可根据要求提供自定义数据和视频链接支持。























")


