
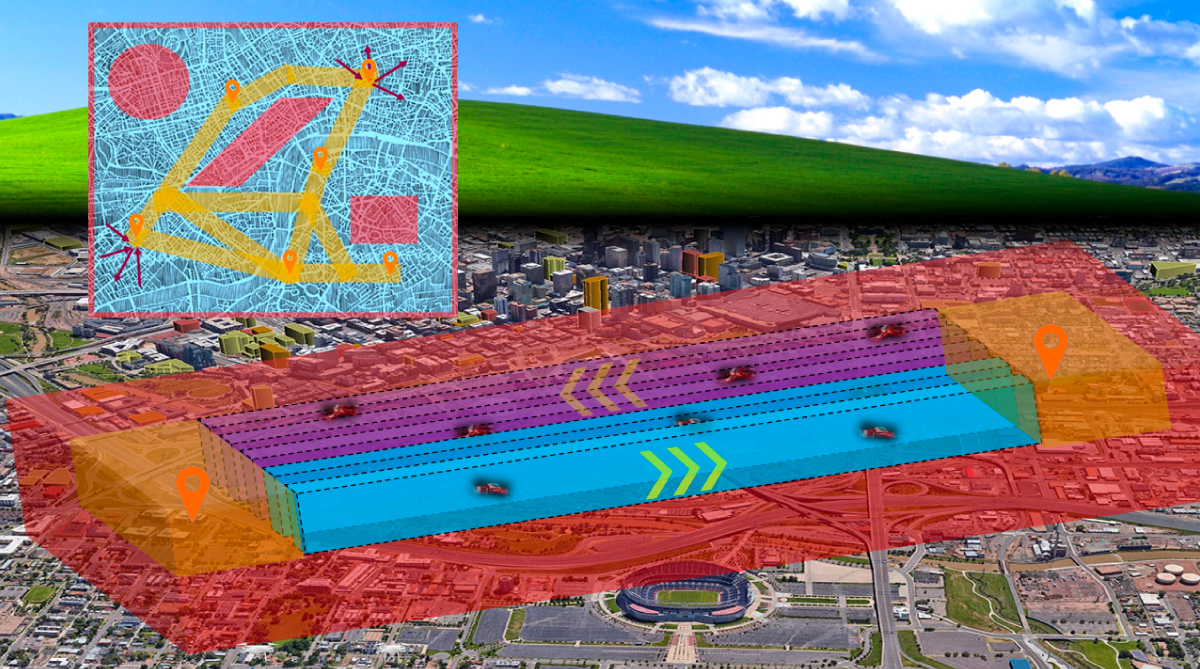
我们的飞行汽车运输系统安全地集成到城市和郊区的天空需要与其他现有飞机,低空飞行器以及我们的V200飞行汽车的交通管理适当共享空域。Varon Vehicles运输系统将在已建立的空域网络内运行包含虚拟通道的卷。这些将连接将考虑城市的移动需求和可用的运输多模式替代方案的顶点,用于第一和最后一英里覆盖。该网络的设计考虑了机场和敏感基础设施等禁飞区,已建立的低空飞机航线,城市地形,风况,障碍物,机动性需求预测和我们的飞行汽车的续航能力。这些空域容量以及其中的虚拟通道将遵循我们称之为Urban Geodesics的方式这是考虑这些因素时从一个顶点到另一个顶点的最短路径。每辆V200驾驶员都会在车上显示一条与所覆盖路线相对应的虚拟车道,这将限制所有V200的位置和高度。虚拟车道向驾驶员指示行程期间的去向,从原点的自动起飞到目的地直升机的自动着陆,以安全和受控的方式。
我们的飞行汽车必须限制在与所有其他飞机和无人机分开的空域空间。由于我们的飞行器将在非常低的高度飞行,主要是在G级空域,因此有必要整合到UTM(无人机系统交通管理)。UTM是一个空中交通管理生态系统,目前正在开发并在不同国家实施,用于低空空域无人机系统的受控操作。目前正在与负责管理UTM的当地航空当局进行讨论,为构成我们网络的预留空域卷提供授权,在该网络中只允许我们的飞行器运行,不在其他飞机的范围内,无人机系统和商用无人机。在其中,设计了3D虚拟车道,
我们所有的飞行汽车交通都将受到监控,虚拟车道由我们自己或指定的运营商精心策划。这种编排包括日常运营物流,例如多个直升机到达和离开,网络中交叉口的管理,多个V200飞行汽车使用的虚拟车道分区的分配以及根据城市在一天中的不同时间的移动需求而改变的方向。它还包括应急行动,例如在发生无法预料的事件时进行重组,以及为空中当局(例如第一响应者)进入空域卷开放,以防城市或郊区的任何需要。如果飞行汽车离开其指定的虚拟车道,驾驶员和监控站都会收到警报,具有与当地空中交通管制(ATC)自动通信的能力,以提高所有其他附近飞机的安全性。未来的能力可能包括机载飞行计算机的动作,以自动防止飞行汽车离开其指定的虚拟车道(地理围栏)。这保证了所有V200飞行汽车的交通都是有组织的并安全地集成到空域中。它允许我们的运输操作在没有任何ATC负担的情况下进行,同时保持他们对所需情况的意识,并确保驾驶V200s简单直观。这保证了所有V200飞行汽车的交通都是有组织的并安全地集成到空域中。它允许我们的运输操作在没有任何ATC负担的情况下进行,同时保持他们对所需情况的意识,并确保驾驶V200s简单直观。这保证了所有V200飞行汽车的交通都是有组织的并安全地集成到空域中。它允许我们的运输操作在没有任何ATC负担的情况下进行,同时保持他们对所需情况的意识,并确保驾驶V200s简单直观。

























")


