

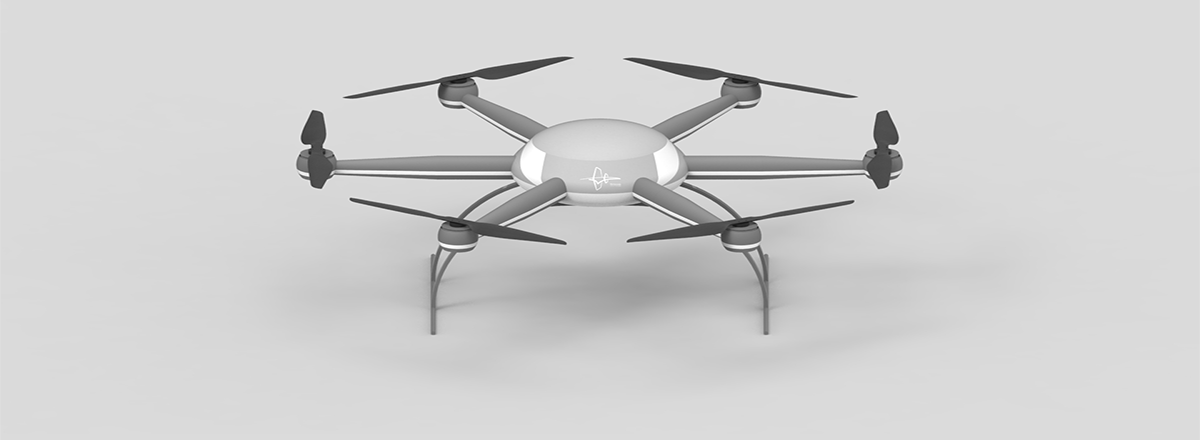
该Q4T无人机是我们Q4E的演变。这款由Mavtech制造的新型无人机具有更高的有效载荷和飞行时间,更好的结构设计,与旧款Q4E相比,轴距增加了5%。自动驾驶仪仍然是Pixhawk 2,它是一个功能强大且可靠的飞行控制器,为您提供最广泛的配置选项和最先进的控制,用于独立飞行和驾驶辅助(可选择安装GPS RTK导航系统)。推进系统是T-Motor基础。电池安装在滑动壳体内,滑动壳体插入主框架的中心。通过这种方式,无人机平衡始终是最佳的,并且布局干净整洁。该解决方案允许安装任何6s电池满足1300 W的最小连续放电要求。电池连接器采用火花保护电路,以最大限度地提高安全性和使用寿命。
该Q4T无人机是摄影的理想的飞行平台,用于搜索和救援行动,监视行动和一般于需要精确可靠的导航系统,所有这些专业应用。它也是用于研究和开发目的的合适飞行平台,其中必须轻松访问和重新配置自动驾驶仪。例如,对于那些需要开发基于pixhawk / px4的非常规导航系统的人来说,Q4T无人机是理想的解决方案,可提供稳定,随时可用的飞行平台。
简而言之,Q4T无人机的主要特点是:
简单的模块化结构
灵活的配置
配件的可用性很高
免工具快速起落架
免工具快速释放碳螺旋桨
最大有效负载连接灵活性
通用电池托盘(允许您安装满足最低放电要求的任何6s电池)
可靠的推进系统
兼容任何现有的无线电系统
飞行控制器Pixhawk 2
系统RTK就绪
自动精确着陆信标
提供Micasense RedEdge集成套件
提供Flir DUO Pro R集成套件
10倍变焦全高清摄像头,具有自动目标跟踪功能(可选)
提供各种类型的有效负载集成套件
注意:标准配置的任何修改都可能导致可用性和交付时间的变化。联系我们获取更多信息。
所述Q4T雄蜂能够进行基板的广泛的传感器,由于其高度的灵活性。根据有效载荷/电池比率,应根据具体情况评估飞机的耐久性。我们为每种配置提供可行的飞行时间,但仅限于使用推荐的电池。在Q4T的开发过程中已经对一些传感器进行了测试,其中已经提供了nadiral安装套件,例如:
MicasenseRedEdge®+ DLS集成套件
用于Micasense-MRedEdge®+ DLS的集成套件
适用于Flir DUO™Pro R的集成套件
用于10倍变焦全高清摄像机的集成套件,具有自动目标跟踪功能
可安装在nadiral位置的其他传感器有:
Parrot®红杉
OCI™无人机航空高光谱相机
RIKOLA高光谱相机
FLIR VUE™专业版(R)
各种相机型号
对于其他传感器或非最低点安装(即在平衡环上),将根据具体应用评估定制或COTS解决方案。
Q4T无人机 - 技术规格
| 帧 |
|
| 对角轴距 | 620毫米 |
| 起落架尺寸(高度) | 110毫米(根据要求提供更多选项) |
|
|
|
| 退出 |
|
| 工作电流 | 40A |
| 工作电压 | 6S LiPo |
| 信号频率 | 30Hz~450Hz |
|
|
|
| 飞行参数 |
|
| 起飞重量 | 2800g~4800g |
| 净重(无Lipo,无负载) | 2010克 |
| 最大功耗 | 1500W |
| 悬停功耗 | --- W(@ 3 --- g起飞重量) |
| 悬停时间 | 24分钟(@ 10000mAh和4250g起飞重量) |
| 工作环境温度 | -10°C~ + 40°C |
|
|
|
| 主电池 |
|
| 电压 | LiPo 6s |
| 标准电池托盘,最大允许电池尺寸 | 68 x 58 x 155mm(XT90插头) |
| 最低电池电量要求 | 至少1500w连续放电率 |
|
|
|
| 发动机 |
|
| 外形尺寸 | 42,5×37,5mm |
| KV | 为400rpm / V |
| 最大功率 | 380W,带15“prop 6s |
| Max Thrust | 2480克@ 22,2V |
| 重量 | 156克 |
|
|
|
| 快速释放螺旋桨 |
|
| 材料 | 高性能碳纤维 |
| 尺寸 | 15x5英寸 |
| 重量 | 32克 |


























")


