空中飞来不速之客,它可能是各种无人机,大到彩虹,小到只有手掌大;它们可以窥探要地布局,可以实时监视目标,还可以投放传单甚至炸弹,被敌对势力利用,是公共安全的新隐患。
更常见到的是一些善意的无人机或是航模操控者,飞行器无意间飞入了民航起降空域,干扰了正常的航班起降;飞入了群众聚会场所,一旦失控,将对公共安全造成危害;飞入重大活动、重大赛事现场,干扰了社会的正常秩序。这些是公共安全的新课题。
除了无人机干扰北京首都机场被击落、美国白宫无人机事件、无人机飞越法国核电站等著名无人机负面新闻外,最近又有一些无人机的坏消息。
2016年5月28日傍晚,距成都双流国际机场东跑道十几公里外的龙泉柏阖寺上空,有无人机在活动。因为事发在航班起降空域,东跑道被迫停航关闭达1小时20分钟,这直接导致55个进出港航班延误,严重扰乱了机场飞行秩序。肇事者至今没有找到。
英国电讯报消息,据英国民航局的报告,在去年11月和今年4月间英国就有23起机场无人机事件,包括12起危险接近事件。

|
据最近的报告,美国联邦航空管理局自2015年8月到2016年1月,已经收到了600起机场附近无人机的目击报告。
民用无人机的防范正在被权力机构重视,有关部门正在加强小慢低飞行器的立法管理,市场上也陆续出现了一些发现、预警、干扰、攻击小慢低目标的产品。随着法规的健全,防范手段的提升,小慢低目标的负面作用将会受到极大的削弱。
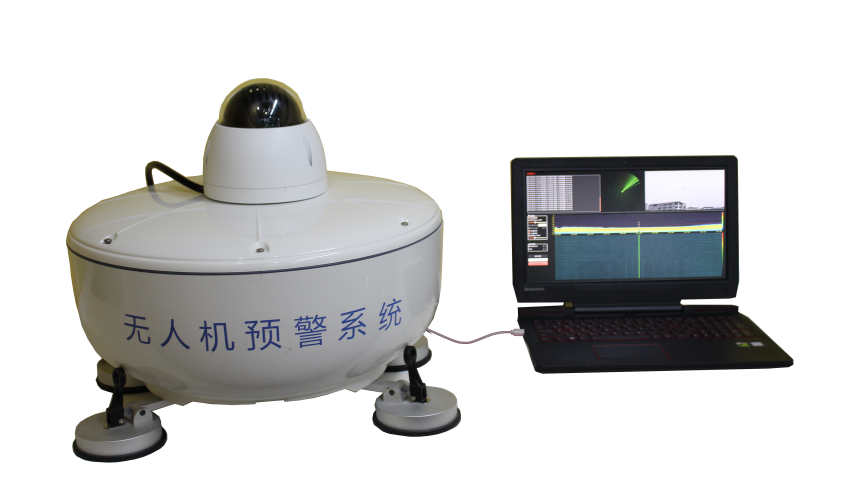
被动监测雷达
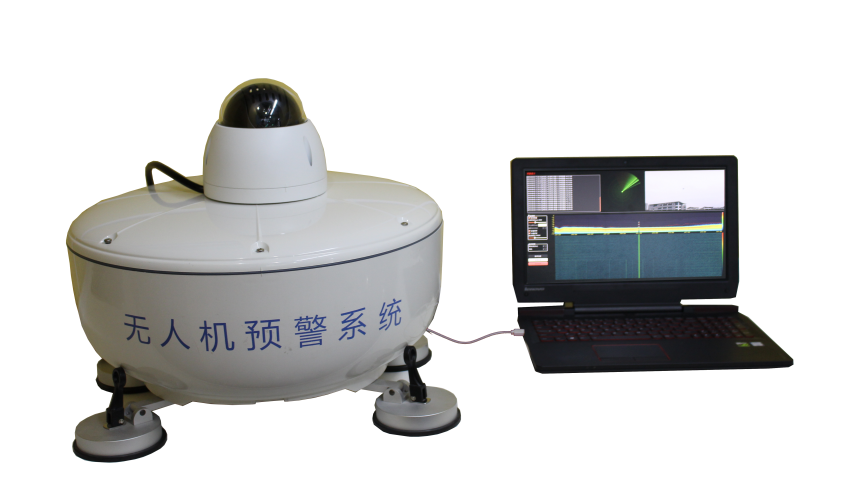
该雷达对大疆等主流无人机提前发现、识别、预警,以便工作人员能尽快针对无人机采取管控措施,确保区域安全。
产品特点:
■ 采用无线电识别和光学识别两种方式,快速识别无人机
■ 自主研发无源雷达,实现8向360°全方位侦测
■ 采用高清激光摄像机(1080P),针对白天、阴天、夜间等场景,可快速识别无人机,自带云台,实现360°全方位探测
■ 最大识别范围1000米
■ 无源雷达锅防水防雷防尘,达到IP66以上标准,适合屋顶、墙头、车载等应用部署
■ 支持短信预警,及时通知相关人员
■ 支持视频回放,播放发现无人机后,自动录制的视频
■ 工作温度:-20°~ 60°
存储温度:-40°~ 70°
主动预警雷达
1、概述 低空小目标探测与干预系统由低空小目标探测子系统、飞禽干预子系统和无人机干预子系统组成,可以对监视区域内的飞鸟、无人机进行探测、监视、驱离、迫降。该系统具有集成度高、使用和维护成本低、全天时和全天候工作、目标自动识别等特点,可以广泛应用于机场或要地附近的空域安全防护。
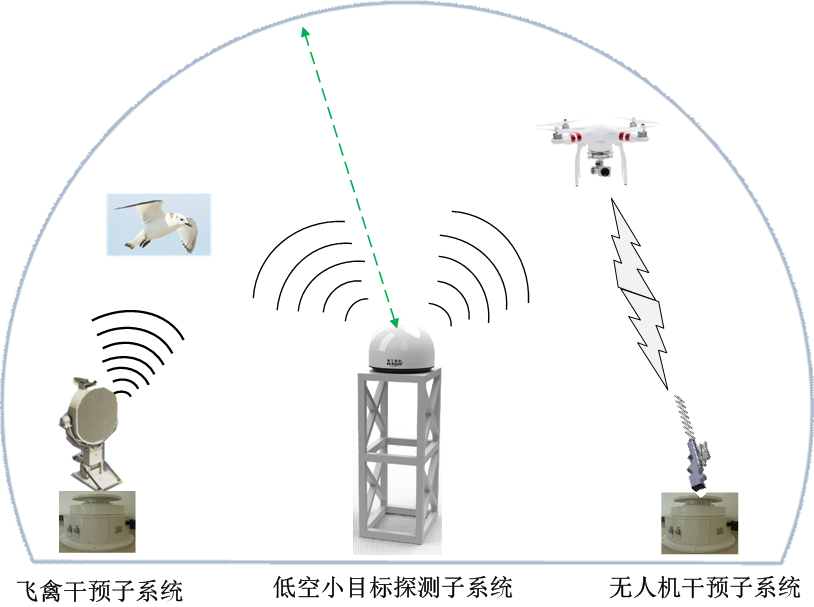
低空小目标探测与干预系统
2、系统组成及技术指标
1) 低空小目标探测子系统
低空小目标探测子系统由低空小目标探测雷达、光电探测设备和远程监控设备组成,用于对空域内侵入目标的探测、监视、识别、跟踪和确认,并向干预子系统提供定向引导功能。
功能特点:
l 系统对监测空域6km范围内的鸟类、无人机等目标实施监测;
l 系统具有全空域360°覆盖、全天时全天候工作等优点;
l 提供目标距离、方位、高度三维坐标信息;
l 具备鸟类、旋翼无人机目标识别能力
性能指标:
l 工作波段: Ku
探测威力: 6km
l 覆盖范围
方位: 0°~360°
俯仰: 0°~90°
l 距离分辨率:1m
l 扫描速率: 24rpm
l 功耗: 5kW
2) 功能及技术指标:
n 作用距离:<1km
n 通信信号干扰
l 工作频段:2.4G-2.5G、5.7G-5.8G、890M-910M
l 干扰样式:噪声干扰、点频干扰、扫频干扰等
n 导航信号干扰
l 模式1:产生功率信号,压制无人机的卫星导航信号
l 模式2:模拟生产GPS/BD信号,欺骗无人机的卫星导航系统
l 频点:GPS L1、BD B1
3) 无人机干预子系统

无人机干预子系统通过发射通信频段内的同频干扰信号,阻断无人机与遥控器之间的数据链路;或发射无人机所在位置的卫星导航欺骗信号,迫使其坠落、返航。
功能特点:
具有压制干扰、欺骗干扰和组合干扰方式
可以逼真的模拟卫星导航信号
3、系统工作过程
系统首先由低空小目标探测子系统对监视空域进行探测,一旦发现有物体侵入监视空域,会立刻提醒监控人员,并将侵入物体的类型、三维坐标、运动轨迹和运动速度等信息发送到远程监控设备。
监控人员可以通过远程监控设备对侵入物体进行远程观察并进行确认,然后选择干预方式。
如果是鸟类侵入防范空域,飞鸟干预子系统会根据探测雷达提供的三维坐标,向该方向播放声波信号和警告提示,对鸟类进行驱散。
如果是无人机侵入,则无人机干预子系统会向探测雷达提供的三维坐标方向进行信号干扰,迫使无人机坠落、返航、迫降。
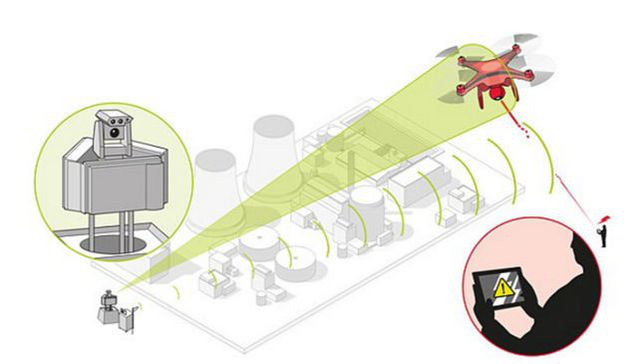
飞行器干扰仪
小飞行器干扰仪是我国安保领域急需的防务装备,用于对低空慢速小目标如GPS定位飞行器、航模等进行软杀伤性拦截(干扰),具有精度高、便携、单兵操作、“绿色”发射等实用特点,广泛用于重要会议、大型集会、重要场所等的安全防卫。
1、  功能
功能
1) 能有效干扰GPS定位飞行器、航模的遥控信号,使其不能遥控操作,达到偏离原飞行路径(航迹偏离、跌落)的目的;
2) 干扰飞行器用于无线图像传输频率,阻断其传输途径;
3) 一旦发现非法航空器靠近、进入警戒区域,即对其实施定向干扰拦截(激光标定目标,随之定向天线定向)。
2、 技术指标
1) 干扰频段
27MHz:26-28MHz 海模/车模
40MHz:40-41MHz 海模/车模/空模
72MHz:72-73MHz 空模
L1 :1575.42±10 MHz GPS
B1:1561.098 ±2.046 MHz 北斗
2.4GHz:2405-2483MHz图传 遥控等
2) 干扰距离
GPS飞行器:不低于1500米
遥控飞行器:干/通比大于3(遥控距离500米以内的飞行器)
3)  电源
电源
电池应用
连续发射不低于2小时
候机时间不低于8小时
220VAC交流 连续工作不低于8小时
4) 设备重量
20Kg
5) 尺寸
56´35 ´ 23cm
6) 操作方式
通过设备配备的远距离望远镜一旦发现非法航空器靠近、进入警戒区域,即对其实施定向干扰拦截(激光标定目标,随之定向天线定向)。可单兵携带及操作。
近中距无人机可见光识别跟踪方案
1 应用场景
通过部署近中距无人机识别跟踪系统,在禁飞区等限制区域实现近中距离无人机目标的检测、识别、跟踪和报警。
2 系统介绍
2.1 系统部署
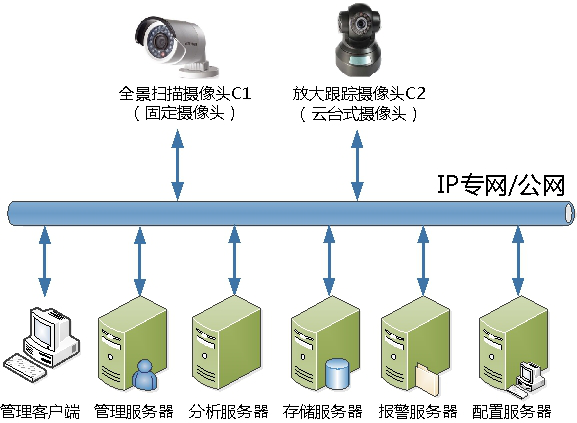
无人机检测识别系统部署方式如下:
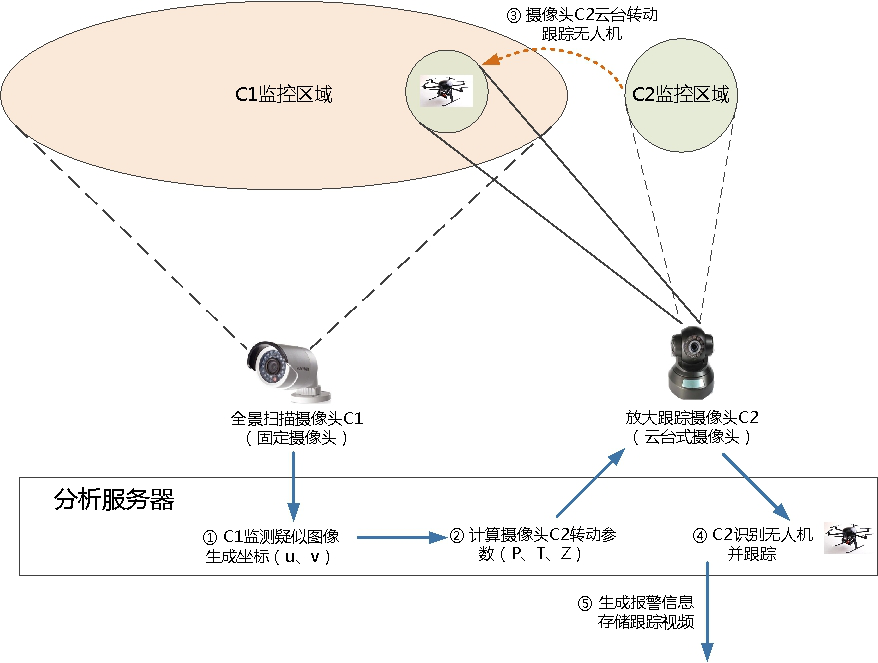
(1)部署全景扫描摄像头C1和放大跟踪摄像头C2;摄像头C1、C2位置相对固定。
(2)C1摄像头:该摄像头为固定摄像头,利用背景减除算法提取前景,检测出无人机飞行疑似区域;
(3)C2摄像头:该摄像头为云台式摄像头,负责将无人机飞行疑似区域放大,并抓取图像的中央成像;
(4)各类服务器:管理服务器、分析服务器、存储服务器、报警服务器、配置服务器;
(5)管理客户端。
2.2 无人机识别、跟踪方案
(1)C1摄像头利用背景减除算法提取前景,检测出无人机飞行疑似区域的图像坐标(u、v);
(2)分析服务器利用C1估计得到的内参参数计算偏转角度P、T和倍数Z,并将P、T、Z传递给C2;
(3)C2摄像头接收来自C1的P、T、Z信息,并读取当前自身的P'、T'、Z'信息,计算两者差值,需要转动及拉伸的参数后控制云台完成转动,将疑似区域放大并在C2抓取图像的中央成像;
(4)无人机识别:利用训练得到的无人机模型检测C2抓取的图像中是否存在无人机,若存在则进行上报,或通知C1控制C2摄像头继续对目标进行跟踪,若不存在则控制摄像头复位;
(5)如识别发现无人机,则生成无人机报警信息,并存储无人机跟踪视频。
无人机识别、跟踪流程图
系统架构
系统架构图
系统由各类服务器、管理客户端、固定摄像头、云台摄像头组成。
各服务器均具有守护进程,防止服务器程序运行时,因意外因素掉线后重启。
系统内各服务器功能如下:
(1)管理服务器
l 负责用户请求的认证(用户权限管理);
l 管理、调度各服务模块,保存管理数据;
(2)分析服务器
l 负责将前端设备接入平台,转换平台与设备间的差异;
l 负责视频智能分析功能。功能包含:摄像头诊断功能、基本智能分析功能、无人机识别跟踪和视频摘要等;
(3)存储服务器
l 针对报警消息,保存将前端设备的音、视频信息到存储介质中;
l 并提供文件转发服务,方便用户查看;
(4)报警服务器
l 负责将报警消息通过报警声、报警灯、邮件、短信等方式通知管理人员;
(5)配置服务器
l 完成系统中各个控制、服务模块的配置,如人员管理、设备管理、计划配置等工作。
2.3 分析服务器
分析服务器包含:无人机识别模块、无人机跟踪模块、云台控制模块,分别完成如下功能:
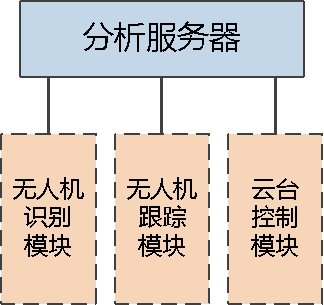
分析服务器架构图
(1)无人机识别模块
l 利用机器学习算法训练得到的方法,针对目标区域检测是否存在无人机,同时区分无人机与其他疑似目标,如飞鸟,云,飞机等。无人机样本在前期进行采集并离线训练。
(2)无人机跟踪模块
l 发现无人机后,后台跟踪其运行轨迹。如有需要,在显示界面画出其运动轨迹;
l 若无人机较远(在显示界面中小于*个像素),则调度云台摄像头进行跟踪;
(3)云台控制模块
l 控制云台转动,拍摄指定位置的目标。通过固定摄像头中无人机所在位置,精确计算云台转动角度,并控制云台转动;
l 如果目标在固定摄像头中足够大小,则可不调度云台控制采集目标信息;
3 扩展应用
该方案提出了一种通过摄像头云台联动进行近中距离无人机识别跟踪的一般方法。
利用相同的架构,可以把云台联动扩展为一对多模式,进行公共场所的多目标跟踪。
为了节省成本该方法也适用于单云台摄像头模式,即确定了目标点后直接计算云台需要转动的PTZ,并控制云台转动,但在单摄像头模式下要求物体移动的角速度不能过高,否则容易导致跟踪始终滞后。
无人飞行器干扰器
一、 设备组成及原理
设备由手持式主机和电池组组成。手持式主机为三频段发射机天线一体化设计,可以同时产生2.4GHz/5.8GHz频段无人机飞控干扰信号以及卫星定位干扰信号,通过对无人机的上行飞控信道和卫星定位信道进行阻塞式干扰,从而使其失去飞控指令和卫星定位信息,使之无法正常飞行,根据无人机的设计不同会产生返航、降落以及坠落的管控效果。
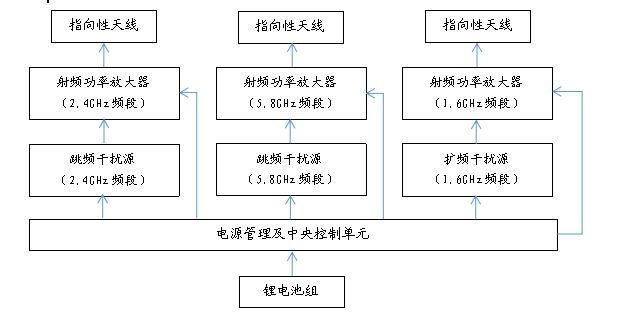
JH-160 手持式无人机管控设备原理图
二、 设备技术指标
* 管控频率范围: 2.400~2.483GHz (频段Ⅰ)
5.725~5.850GHz (频段Ⅱ)
1.559~1.620GHz (频段Ⅲ)
* 等效全向辐射功率:
49dBmW (频段Ⅰ)
43dBmW (频段Ⅱ)
46dBmW (频段Ⅲ)
 * 波束宽度: 水平面27° 垂直面23° (频段Ⅰ)
* 波束宽度: 水平面27° 垂直面23° (频段Ⅰ)
水平面25° 垂直面22° (频段Ⅱ)
水平面28° 垂直面26° (频段Ⅱ)
* 管控信号样式: FHSS(跳频)/DSSS(直接序列扩频)
* 管控距离: 1公里(无人机距离遥控器200米,高度不低于30米时)
* 供电方式: 聚合物锂电池67Wh (22.2V)
* 工作时间: 大于8小时 (典型工况)
大于50分钟 (连发状态)
* 体积: 主机 55mm(直径)×404mm(长度)
天线最大宽度90mm
电池 30mm×82mm×145mm
* 重量: 主机1.51kg 电池组0.65kg
* 设备组成: 手持式主机1台、电池2块、充电器一个、腰带式电池包1个、装载箱一只。
 |