具有完全自主飞行和悬停模式容易无人机可以让您实时发送视频和接收高品质的航拍图像。悬架系统允许的视线相机相机的线路进行远程控制。置于飞行平台的角落六个起重螺丝。电动机转动螺杆,机载,从电池吸取功率。使用方法:在大规模的政治和体育赛事的摄影灾害防治农田和快速制图,监测地点。自动控制系统(自动驾驶仪)与上板的导航系统(GPS / GLONASS)消除了“人”的因素和显著提高整个系统的可靠性。
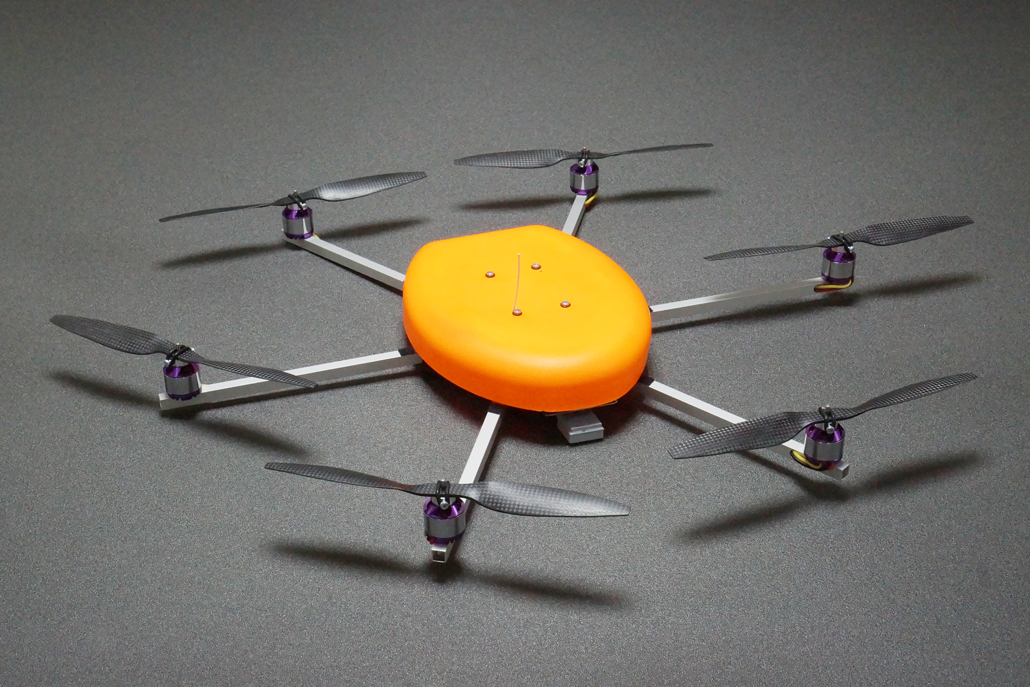
无人机,直升机短程Supercam X6的性能特点
半径的无线电信道(TV,IR) - 5公里
飞行时间 - 40分钟
尺寸 - 毫米500h600h160
最大高度 - 千米
起飞/着陆 - 立式
发动机类型 - 电动
速度 - 0-40公里/小时
起飞重量 - 1.5公斤
有效载荷重量 - 0.3公斤
导航 - GPS / GLONASS
有效载荷 - 视频/图片/ IR PAL-HD / 12MP / 640 * 480
温度范围-30°... + 30°
复杂的推荐组合物:
| 数 | 名 | 数 |
| 1 | 遥控无人驾驶汽车 - 的情况下pylevlagozaschischennom NSO地面控制站(笔记本电脑,操纵杆,视频ADC,一组电缆),软件控制的无人机 | 1 |
| 2 | 无人multicopter(直升机)Supercam X6与飞行时间长达40分钟(导航灯,内置数字遥测系统,与SNA无线电接收机(空气对角)时,自诊断系统) | 2 |
| 3 | 集装箱运输无人机 | 2 |
| 4 | 地面天线 | 1 |
| 五 | 有效载荷的相机 | 1 |
| 6 | 有效载荷摄像机 | 1 |
| 7 | 有效载荷成像仪 | 1 |
| 8 | 充电器 | 1 |
| 9 | 电瓶 | 4 |
| 10 | 备件和工具 | 1 |
复杂的功能:
调整(添加,删除和移动路径点),飞行任务的全面重启和飞行过程中读取来自其他国家统计局任务;
飞行任务,并考虑到高程图的编制;
UAV控制转移从一个NSO到另一个的可能性;
从主板上实时传输视频无人机到国家统计局。观看和录制高清视频与飞行后分析和进一步处理的可能性;
切换视频信道船上的UAV在与NSO一队飞行的能力;
以输出数据的能力(速度,高度,坐标测量/矩形中,UAV飞行电池电压,格林威治标准时间的长度)取视频;
自动控制系统(ACS - 自动驾驶仪UAV)提供UAV保持在预定高度,在水平和垂直平面执行预定动作,所述任务的执行;
UAV提供根据预先设定的程序自动飞行,它具有到对象悬停的能力。飞掠点可以实时由运营商移动,考虑到调整风或电子卡的故障;
半自动控制可使用多功能控制杆来实现;
防止控制的丧失(在断裂UAV通信返回到起点,并执行自动登陆);
能力,以控制与NSO操纵杆有效载荷;
稳定的相机系统和热成像仪使得能够完全地查看下半球;
4 UAV的同时操作的可能性;
控制UAV NSO和两个控制传输的能力;
语音模块NSO(全部队和飞行条件,风速和飞行任务的性能电流变化的语音确认);
自动返回在UAV预定点;
起飞和着陆在自动模式下执行的;
以国家统计局的互联网网络视频传输整合的能力;
有能力的国家统计局连接到互联网与远程终端的一个功能齐全的功能的Web服务器;
您可以在国家统计局的运行工作。
该套件包括软件地面控制站。所有无人机公司“无人系统”支持3飞机控制在他的飞行时间模式:
1)自动-无人机飞行预定程序,可能不是由于国家统计局,如果运营商有可能改变控制点,高度,速度的能力,利用在地面控制站接口LA等参数;
2)半自动-操作者改变的过程中,高度,速度,并与接口地面控制站的帮助飞机的其它参数。
UAV有能力调度自动登陆:
1)通过从NSO(在开始点的指令);
2)在飞行任务(预置点)的完成。
在紧急降落的情况下进行:
1)当连接(通过起点)破裂;
2)当电池放电到低于临界电平(当前点)。
无人机套件收到后马上就可以使用了。