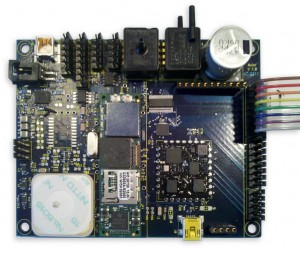
ATI Avior自动驾驶仪是一种高级设计,围绕高性能,高品质,最先进的部件和传感器。 CPU是600 Mhz OMAP 3503,提供256 Mb的Flash和256Mb的RAM。核心传感器包括Vectornav VN100T IMU和Ublox Neo 6 GPS。固件是围绕先进的15状态卡尔曼滤波器构建的,它将惯性和GPS传感器数据混合,以准确估计滚动,俯仰和真实的偏航角。 ATI Avior以一个小包装和有竞争力的价格提供前所未有的性能,准确性和功能。
尺寸:103mm x 82mm x 13mm
体重:68克
德州仪器OMAP 3503 CPU(600 Mhz ARM Cortex-A8,高达1200 Dhrystone MIPS)
256Mb RAM,256Mb闪存,MicroSD插槽
I2C,SPI,1线UART,高速USB主机和USB OTG,以太网
8个PWM输入,8个PWM输出,6个模拟输入
专业的双面SMT(表面贴装技术)Mil-Spec
5 - 44.4V输入电压范围
0C
加速度计范围:+/- 2g / 6g
陀螺仪范围:500度/秒
磁强计范围:6高斯
冲击极限:1000g(无动力),500g(动力)
具有真向估计(INS / GNS)的高级15状态卡尔曼滤波器
100hz过滤器更新率
Ublox Neo 6 GPS
5 Hz导航率
抗干扰技术
冷启动:26秒,热启动:1秒
无线调制解调器:直接插件支持Digi 900 Mz XTend调制解调器 - 为外部调制解调器和硬件提供串行或IP连接。
基于IMU的稳定和飞行控制--15状态卡尔曼滤波器提供精确的滚动,俯仰和“真实”偏航角估计
WGS-84(大圈)路线导航
无限航路点(仅限硬件RAM)
支持固定的航路路线和“路由模式”,可以在启动时或飞行期间重新定位
准确的机载风矢量估计
稳定的航向控制(即使在大风运行中)
自主飞行模式;命令增强飞行模式;手动飞行模式。
圈保持(风补偿)
高度保持(基于音高或基于油门)
速度保持(基于音高或节气门)
失去链接返回家庭安全功能
包括用于附加传感器和硬件的驱动程序
广泛的船上数据记录
通过开放的,有说明力的API进行实时空对地通信
能够直接控制基于伺服的云台摄像机构,支持WGS-84点数和NED矢量保持
固件使用强大的基于四元数的公式结合基于卡尔曼滤波器的姿态估计来计算正确的平移/倾斜角度偏移,用于将相机指向独立于飞机运动的预期目标
利用这一内部数学的潜力来驱动更复杂的基于步进电机的摇摄/倾斜机制。
汽车发射,汽车用地(正在开发中)