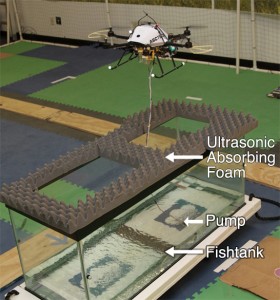
这项研究的目标是开发一种空中水采样系统,该系统可以快速安全地部署,以便到达不同的和难以进入的位置,与现有的静态传感器集成,并且适用于广泛的科学目标。在大面积上获得快速样本的能力将导致对关键自然资源的理解的显着增加。该研究将通过使用半自治系统来检测故障和未知情况,以确保操作员和环境的安全,从而实现非专家操作员和机器人之间更好的交互。
该研究部分资金通过美国农业部国家粮食和农业研究所(Grant#2013-67021-20947)作为国家机器人计划的一部分。
可预测的运行时监控
我们正在开发一个框架,可以为无人机应用程序提供可预测的运行时监控。简而言之,运行时监控的可预测性要求1)检测延迟受上限限制,2)运行时监控资源受到控制。以前,我们开发了这样做的理论,但是,现在我们正在努力将这个应用于运行ROS的无人机。这是特别具有挑战性的,因为如ROS网站所述,ROS不是专为实时应用程序设计的。因此,我们正在将我们的理论工作调整到这个真实的系统,以保证ROS程序的实时性能。
对于可调度性的正式证明,我们需要获得一些任务参数,例如周期(或最小到达间隔时间),WCET(最坏情况执行时间)。不幸的是,这看似简单的工作并不容易。由于缓存效果和I / O操作,任务的WCET可能在很大范围内变化。如果我们只是将测量的最大执行时间值用作WCET,那么系统无法通过正式的可调度性测试(但它在实践中仍然运行良好!)在某些实时系统中,人们可能会如此悲观。禁用缓存并限制I / O操作以获得可预测的时序信息,但我们希望避免这样做,因为它会降低实际性能。
该项目部分由NASA赞助。
 粤公网安备 44010602004357号
粤公网安备 44010602004357号